

Michael Kaess
ProfessorRobotics Institute (RI)
School of Computer Science (SCS)
Carnegie Mellon University (CMU)
Field Robotics Center (FRC) and Computer Vision Group (CV)
Director, Robot Perception Lab (RPL)
Program Director, Master of Science in Computer Vision (MSCV)
5000 Forbes Ave, Room NSH 2100G
Pittsburgh, PA 15213-3890
Phone: (412)268-6905, Email: kaess@cmu.edu
I am interested in mobile robot autonomy. One of the first problems encountered when robots operate outside controlled factory and research environments is the need to perceive their surroundings. My research focuses on efficient inference at the connection of linear algebra and probabilistic graphical models for 3D mapping and localization.
I have previously been a Research Scientist and a Postdoctoral Associate at the Massachusetts Institute of Technology (MIT), in John Leonard's Marine Robotics Lab. In 2008 I have received my PhD in Computer Science from the Georgia Institute of Technology, advised by Frank Dellaert.
News
- Nov 2024: Suddhu's Science Robotics paper is published: Neural feels with neural fields: Visuo-tactile perception for in-hand manipulation.
- Nov 2024: Joe's RA-L paper got accepted: NormalFlow: Fast, robust, and accurate contact-based object 6DoF pose tracking with vision-based tactile sensors.
- Oct 2024: Easton's RA-L paper got accepted: Robust preintegrated wheel odometry for off-road autonomous ground vehicles.
- Oct 2024: Easton's IEEE Journal of Oceanic Engineering paper appeared: HoloOcean: A full-features marine robotics simulator for perception and autonomy.
- Oct 2024: Mohamad co-authored a PAMI paper that was accepted: Z-splat: Z-axis Gaussian splatting for camera-sonar fusion.
- Sep 2024: We have presented 3 papers at IROS 2024 in Abu Dhabi, UAE: vision-based cross-view vehicle registration in off-road GPS-denied environments, cross-view localization and matching via birds-eye-view synthesis, and incremental nonparametric inference in high dimensional state spaces.
- Aug 2024: This Fall I am again teaching Robot Localization and Mapping (16-833).
- Jul 2024: Mohamad presented his paper on neural rendering for acoustic-optical sensor fusion at SIGGRAPH 2024 in Denver, CO.
- Jul 2024: Dan presented his paper on incremental distributed optimization at RSS 2024 in Delft, Netherlands.
- May 2024: Dan's paper on asynchronous distributed smoothing and mapping was a finalist for Best Multi-Robot Systems Paper at ICRA 2024.
- May 2024: We have presented 4 papers at ICRA 2024 in Yokohama, Japan: asynchronous distributed smoothing and mapping, learning covariances for estimation with constrained bilevel optimization, multi-radar inertial odometry and sonar image correspondence.
- Jan 2024: This Spring I am again teaching Robot Localization and Mapping (16-833).
- Oct 2023: Allie presented her paper on neural readiance field with lidar maps at ICCV 2023 in Paris, France.
- May 2023: We have presented 4 papers at ICRA 2023 in London, UK: robust incremental smoothing and mapping (riSAM), neural implicit surface reconstruction using imaging sonar, sonar image filtering for occupancy mapping and bundle adjustment for coplanar points and lines.
- Feb 2023: Wei's PAMI paper has been accepted: ASH: A Modern Framework for Parallel Spatial Hashing in 3D Perception.
- Jan 2023: I started as MSCV Program Director (Master of Science in Computer Vision).
- Oct 2022: I am excited to have received the Outstanding Associate Editor Award at IROS 2022.
- Oct 2022: We have presented 6 papers at IROS 2022: Incremental Constrained Optimization using the Bayes Tree, Acoustic Localization with MEMS Microphones, HoloOcean: Realistic Sonar Simulation, Depth Estimation for 3D Imaging Radar, Group-k Consistent Measurement Set Maximization, LiDAR SLAM with Planes, Lines and Cylinders (published in RA-L).
- May 2022: Lipu's paper on direct point-line visual odometry received the Outstanding Navigation Paper Award at ICRA 2022.
- May 2022: We have presented 6 papers at ICRA 2022: GPS-denied ground vehicle localization, Shape mapping through dense touch and vision, In-hand tactile tracking with learned surface normals, HoloOcean underwater robotics simulator, Direct point-line visual odometry, Information-theoretic multi-camera extrinsics calibration (published in RA-L).
- Apr 2022: Congratulations to Yehonathan and Dan for receiving NSF Graduate Research Fellowships!
- Apr 2022: Allie will present her visual map sparsification work at CVPR 2022.
- Mar 2022: I am Associate Editor for IROS 2022.
- Nov 2021: Paloma's CoRL paper learns energy-based models in factor graphs, avoiding the need for differentiable optimizers.
- Oct 2021: Alex' paper on localizing ground penetrating radar was a finalist for the best paper and best student paper at IROS 2021.
- Oct 2021: We have presented 4 papers at IROS 2021: Map compression for LiDAR registration, Localizing ground penetrating radar, LiDAR SLAM with plane adjustment (published in RA-L), and Direct point-line monocular visual odometry (published in RA-L).
- Aug 2021: This Fall I am teaching Geometry-based Methods in Vision (16-822).
- Jun 2021: I gave a talk at the Tartan SLAM series on factor graphs and robust perception.
- May 2021: Suddhu's paper on tactile SLAM was a finalist for the best service robotics paper at ICRA 2021.
- May 2021: We have presented 7 papers at ICRA 2021: Learning tactile models for factor graph, Tactile SLAM, Compositional object SLAM, Compressed 3D map for monocular registration, Joint instance segmentation of point clouds and images, LiDAR smoothing and mapping with planes, and Perspective n-Line solution (published in RA-L).
- Feb 2021: I am Associate Editor for IROS 2021.
- Dec 2020: Our camera-lidar extrinsic calibration from IROS 2018 has been incorporated into Matlab.
- Oct 2020: We have presented 5 papers at IROS 2020: Ambiguity-aware robust active SLAM, Efficient multiresolution scrolling grid, Efficient trajectory library filtering, Fermat paths for imaging sonar reconstruction, and Multi-stereo visual-inertial odometry.
- Jul 2020: Frank Dellaert and I received the Inaugural RSS 2020 Test of Time Award "For pioneering an information smoothing approach to the SLAM problem via square root factorization, its interpretation as a graphical model, and the widely-used GTSAM free software repository."
- May 2020: We have presented 5 papers at ICRA 2020: Active underwater SLAM, Incremental constrained smoothing, Volumetric albedo 3D reconstruction from imaging sonar, Fast pose estimation from 3D correspondences, and Unsupervised learning of monocular depth (published in RA-L).
- Mar 2020: I have started as Associate Editor for IEEE Robotics and Automation Letters.
- Feb 2020: I am Associate Editor for IROS 2020.
- Nov 2019: We have presented 6 papers at IROS 2019 in Macao: Consistent occupancy grid maps for planning, Robust scene reconstruction, Wide-aperature imaging sonar reconstruction, Dense sonar-based underwater reconstruction, Degeneracy-aware factors, Efficient perspective-n-point solution.
- Sep 2019: I am Associate Editor for ICRA 2020.
- Jul 2019: This Fall I will teach an extra instance of Robot Localization and Mapping (16-833) because of popular demand.
- Jun 2019: Together with Guoquan (Paul) Huang, Shaojie Shen, Stergios Roumeliotis, and John Leonard, I am co-organizing the IROS 2019 Workshop on Visual-Inertial Navigation: Challenges and Applications.
- May 2019: We have presented 5 papers at ICRA 2019 in Montreal, Canada: Joint surface reconstruction from vision and LiDAR, Globally and locally consistent RGB-D reconstruction, Multi-hypothesis iSAM, Physics-based multi-view reconstruction of wires, and Through-water AUV localization (published in RA-L).
- May 2019: Andrew Calway, Srikumar Ramalingam and I organized the second International Workshop on Lines, Planes and Manhattan Models for 3-D Mapping at ICRA 2019. Speaker slides are now available.
- Oct 2018: Jerry's paper on information sparsification in visual-inertial odometry was nominated for the best conference paper at IROS 2018.
- Oct 2018: We have presented 4 papers at IROS 2018 in Madrid, Spain: Virtual occupancy grid maps, multi-beam sonar processing, information sparsification in visual-inertial odometry, and lidar-camera calibration.
- Sep 2018: I gave an RI seminar on factor graphs in robot perception.
- Aug 2018: I am Associate Editor for ICRA 2019.
- May 2018: We have presented 3 papers at ICRA 2018: Dense planar-inertial SLAM with structural constraints, feature-based SLAM for imaging sonar, and pose-graph SLAM using forward looking sonar (also in RA-L).
- Oct 2017: I am Associate Editor for ICRA 2018.
- Sep 2017: Andrew Calway, Srikumar Ramalingam and I organized the IROS 2017 workshop on Lines, Planes and Manhattan Models for 3-D Mapping. Speaker slides are now available.
- Sep 2017: Our GravityFusion work appeared at IROS 2017 in Vancouver.
- Aug 2017: Frank Dellaert and I published our Foundation & Trends article on factor graphs in robotics.
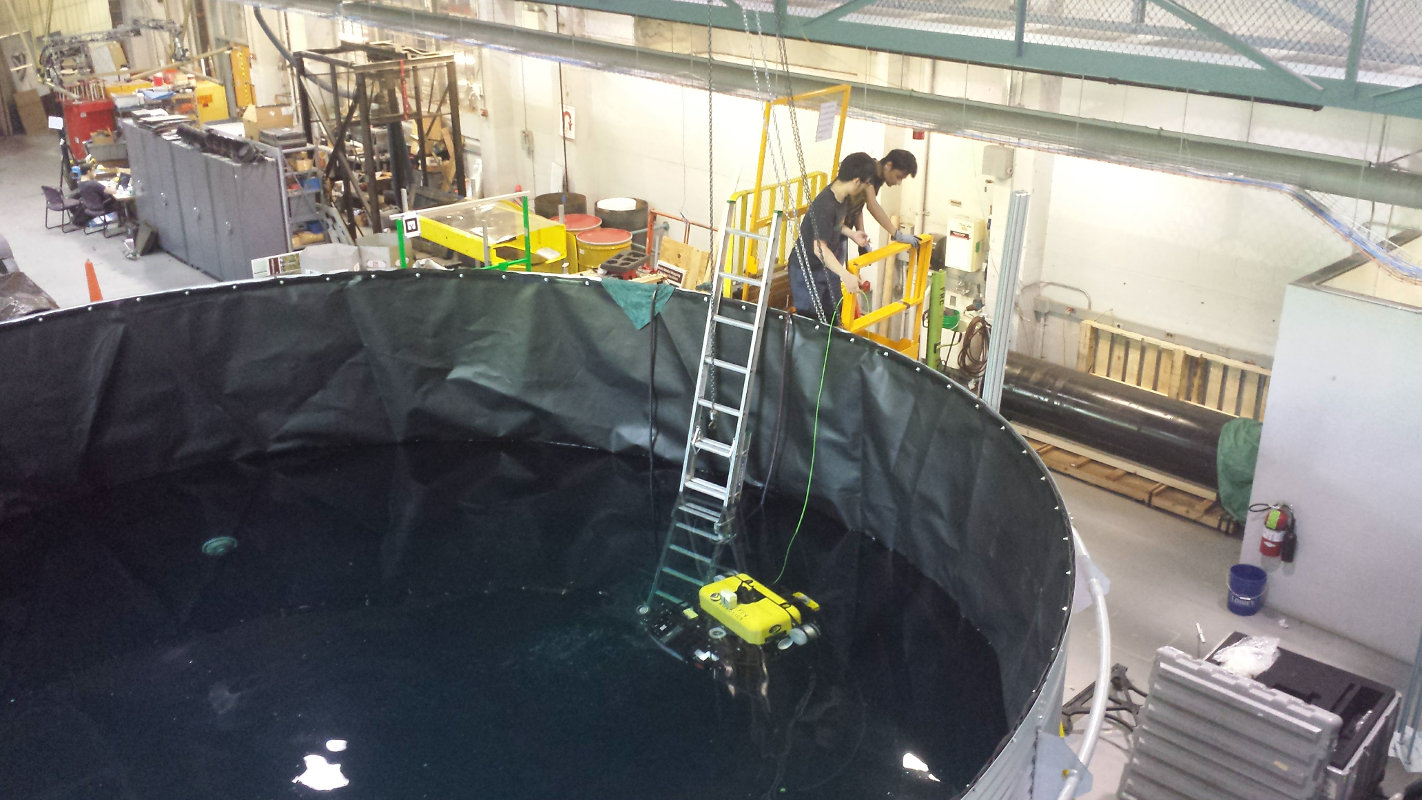
- Jul 2017: First robot testing in our new test tank.
- May 2017: We have presented 4 publications at ICRA 2017: keyframe-based dense planar SLAM, state estimation with touch, stereo matching with normal prediction, and direct visual odometry with binary descriptors (also in RA-L).
- Jan 2017: This Spring I will teach a new class: Robot Localization and Mapping (16-833).
- Oct 2016: We have presented 5 publications at IROS 2016: GPS-denied long distance flight, inference with multimodal posteriors, data association for ASFM, underwater mapping, and monocular planar mapping.
- Sep 2016: I am Associate Editor for ICRA 2017.
- Jun 2016: I will again co-teach Statistical Techniques in Robotics with Kris Kitani.
- May 2016: Matt Klingensmith's ARM-SLAM RA-L paper was nominated for the best vision paper at ICRA 2016.
- May 2016: At ICRA 2016, I gave invited talks at the SLAM tutorial and the marine localization and navigation workshop.
- Jan 2016: We have two upcoming papers at ICRA 2016: On Degeneracy of Optimization-based State Estimation and Articulated Robot Motion for Simulteaneous Localization and Mapping.
- Aug 2015: We have two upcoming papers at IROS 2015: Towards Acoustic Structure from Motion and Bridging Text Spotting and SLAM with Junction Features.
- Jul 2015: I am co-teaching Statistical Techniques in Robotics (Fall 2015) with Kris Kitani.
- Apr 2015: I am Associate Editor for IROS 2015, which will be held in Hamburg, Germany.
- Feb 2015: I am now Associate Editor for IEEE Transactions on Robotics.
- Jan 2015: We have two upcoming publications in ICRA 2015: Mapping with Infinite Planes and 3D Mosaics from Imaging Sonar.
- Dec 2014: Our "Kintinuous" journal paper has been accepted to IJRR: Real-time large-scale dense RGB-D SLAM with volumetric fusion.
- Oct 2014: I am Associate Editor for ICRA 2015, which will be held in Seattle.
- Sep 2014: We have tested our in-water ship inspection robot on the NS Savannah, the first nuclear powered passenger and cargo ship, and a national historic landmark.
- Aug 2014: I received a Google Faculty Research Award.
- Jun 2014: I have organized a Visual SLAM tutorial at CVPR 2014 together with Frank Dellaert.
- May 2014: Upcoming paper on depth enhanced monocular odometry with Ji Zhang and Sanjiv Singh at IROS 2014.
- Apr 2014: Journal paper with David Rosen and John Leonard accepted to TRO: RISE: An Incremental Trust-Region Method for Robust Online Sparse Least-Squares Estimation.
- Mar 2014: Our journal paper on Concurrent Filtering and Smoothing has been accepted to IJRR.
- Jan 2014: I have two upcoming papers in ICRA 2014: on visual-inertial navigation with Paul Huang and John Leonard, and on incremental segmentation with Ross Finman, Tom Whelan, and John Leonard.
- Nov 2013: Starting at Carnegie Mellon University.
{kind=link}
Selected Publications [All Publications...]
Neural feels with neural fields: Visuo-tactile perception for in-hand manipulation by S. Suresh, H. Qi, T. Wu, T. Fan, L. Pineda, M. Lambeta, J. Malik, M. Kalakrishnan, R. Calandra, M. Kaess, J. Ortiz, and M. Mukadam. AAAS Science Robotics, vol. 9, no. 96, Nov. 2024. Details. Download: PDF.HoloOcean: A full-featured marine robotics simulator for perception and autonomy by E. Potokar, K. Lay, K. Norman, D. Benham, S. Ashford, R. Peirce, T. Neilsen, M. Kaess, and J. Mangelson. IEEE J. of Oceanic Engineering, JOE, vol. 49, no. 4, pp. 1322-1336, Oct. 2024. Details. Download: PDF.
Asynchronous distributed smoothing and mapping via on-manifold consensus ADMM by D. McGann, K. Lassak, and M. Kaess. In Proc. IEEE Intl. Conf. on Robotics and Automation, ICRA, Yokohama, Japan, May 2024, pp. 4577-4583. Best multi-robot systems paper finalist (one of five). Details. Download: PDF.
Robust incremental smoothing and mapping (riSAM) by D. McGann, J. Rogers III, and M. Kaess. In Proc. IEEE Intl. Conf. on Robotics and Automation, ICRA, London, UK, May 2023, pp. 4157-4163. Details. Downlaod: PDF.
Neural implicit surface reconstruction using imaging sonar by M. Qadri, M. Kaess, and I. Gkioulekas. In Proc. IEEE Intl. Conf. on Robotics and Automation, ICRA, London, UK, May 2023, pp. 1040-1047. Details. Download: PDF.
ASH: A modern framework for parallel spatial hashing in 3D perception by W. Dong, Y. Lao, M. Kaess, and V. Koltun. IEEE Trans. on Pattern Analysis and Machine Intelligence, PAMI, vol. 45, no. 5, pp. 5417-5435, May 2023. Details. Download: PDF.
MidasTouch: Monte-Carlo inference over distributions across sliding touch by S. Suresh, Z. Si, S. Anderson, M. Kaess, and M. Mukadam. In Proc. Conf. on Robot Learning, CoRL, Auckland, New Zealand, Dec. 2022. Details. Download: PDF.
InCOpt: Incremental constrained optimization using the Bayes tree by M. Qadri, P. Sodhi, J. Mangelson, F. Dellaert, and M. Kaess. In Proc. IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems, IROS, Kyoto, Japan, Oct. 2022, pp. 6381-6388. Details. Download: PDF.
LEO: Learning Energy-based Models in Factor Graph Optimization by P. Sodhi, M. Mukadam, S. Anderson, and M. Kaess. In Proc. Conf. on Robot Learning, CoRL, (London, UK), Nov. 2021. Details. Download: PDF.
ICS: Incremental Constrained Smoothing for State Estimation by P. Sodhi, S. Choudhury, J.G. Mangelson, and M. Kaess. In Proc. IEEE Intl. Conf. on Robotics and Automation, ICRA, (Paris, France), May 2020. Details Download: PDF.
Active SLAM using 3D Submap Saliency for Underwater Volumetric Exploration by S. Suresh, P. Sodhi, J.G. Mangelson, D. Wettergreen, and M. Kaess. In Proc. IEEE Intl. Conf. on Robotics and Automation, ICRA, (Paris, France), May 2020. Details. Download: PDF.
A Volumetric Albedo Framework for 3D Imaging Sonar Reconstruction by E. Westman, I. Gkioulekas, and M. Kaess. In Proc. IEEE Intl. Conf. on Robotics and Automation, ICRA, (Paris, France), May 2020. Details. Download: PDF.
GPU Accelerated Robust Scene Reconstruction by W. Dong, J. Park, Y. Yang, and M. Kaess. In Proc. IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems, IROS, (Macao), Nov. 2019, pp. 7863-7870. Details. Download: PDF.
Online and Consistent Occupancy Grid Mapping for Planning in Unknown Environments by P. Sodhi, B. Ho, and M. Kaess. In Proc. IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems, IROS, (Macao), Nov. 2019, pp. 7879-7886. Details. Download: PDF.
MH-iSAM2: Multi-hypothesis iSAM using Bayes Tree and Hypo-tree by M. Hsiao and M. Kaess. In Proc. IEEE Intl. Conf. on Robotics and Automation, ICRA, (Montreal, Canada), May 2019, pp. 1274-1280. Details. Download: PDF.
Information Sparsification in Visual-Inertial Odometry by J. Hsiung, M. Hsiao, E. Westman, R. Valencia, and M. Kaess. In Proc. IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems, IROS, (Madrid, Spain), Oct. 2018. Best conference paper finalist (one of six). Details. Download: PDF.
Factor Graphs for Robot Perception by F. Dellaert and M. Kaess. Foundations and Trends in Robotics, vol. 6, no. 1-2, Aug. 2017, pp. 1-139. Details. Download: PDF.
Articulated Robot Motion for Simultaneous Localization and Mapping (ARM-SLAM) by M. Klingensmith, S. Srinivasa, and M. Kaess. IEEE Robotics and Automation Letters (RA-L), 2016. Part of ICRA/RA-L: presented at ICRA 2016 and published in RA-L. Best vision paper finalist (one of five). Details. Download: PDF.
Real-time Large Scale Dense RGB-D SLAM with Volumetric Fusion by T. Whelan, M. Kaess, H. Johannsson, M.F. Fallon, J.J. Leonard, and J.B. McDonald. Intl. J. of Robotics Research, IJRR, vol. 34, no. 4-5, Apr. 2015, pp. 598-626. Details. Download: PDF.
RISE: An Incremental Trust-Region Method for Robust Online Sparse Least-Squares Estimation by D.M. Rosen, M. Kaess, and J.J. Leonard. IEEE Trans. on Robotics, TRO, vol. 30, no. 5, Oct. 2014, pp. 1091-1108. Details. Download: PDF.
Temporally Scalable Visual SLAM using a Reduced Pose Graph by H. Johannsson, M. Kaess, M.F. Fallon, and J.J. Leonard. In Proc. IEEE Intl. Conf. on Robotics and Automation, ICRA, (Karlsruhe, Germany), May 2013. Best student paper finalist (one of five). Details. Download: PDF.
Advanced Perception, Navigation and Planning for Autonomous In-Water Ship Hull Inspection by F.S. Hover, R.M. Eustice, A. Kim, B.J. Englot, H. Johannsson, M. Kaess, and J.J. Leonard. Intl. J. of Robotics Research, IJRR, vol. 31, no. 12, Oct. 2012, pp. 1445-1464. Details. Download: PDF.
iSAM2: Incremental Smoothing and Mapping Using the Bayes Tree by M. Kaess, H. Johannsson, R. Roberts, V. Ila, J.J. Leonard, and F. Dellaert. Intl. J. of Robotics Research, IJRR, vol. 31, Feb. 2012, pp. 217-236. Details. Download: PDF.
Multiple Relative Pose Graphs for Robust Cooperative Mapping by B. Kim, M. Kaess, L. Fletcher, J.J. Leonard, A. Bachrach, N. Roy, and S. Teller. In Proc. IEEE Intl. Conf. on Robotics and Automation, ICRA, (Anchorage, Alaska), May 2010, pp. 3185-3192. Details. Download: PDF.
Covariance Recovery from a Square Root Information Matrix for Data Association by M. Kaess and F. Dellaert. Journal of Robotics and Autonomous Systems, vol. 57, Dec. 2009, pp. 1198-1210. Details. Download: PDF.
iSAM: Incremental Smoothing and Mapping by M. Kaess, A. Ranganathan, and F. Dellaert. IEEE Trans. on Robotics, vol. 24, no. 6, Dec. 2008, pp. 1365-1378. Details. Download: PDF.
Square Root SAM: Simultaneous Localization and Mapping via Square Root Information Smoothing by F. Dellaert and M. Kaess. Intl. J. of Robotics Research, vol. 25, no. 12, Dec. 2006, pp. 1181-1204. Details. Download: PDF.