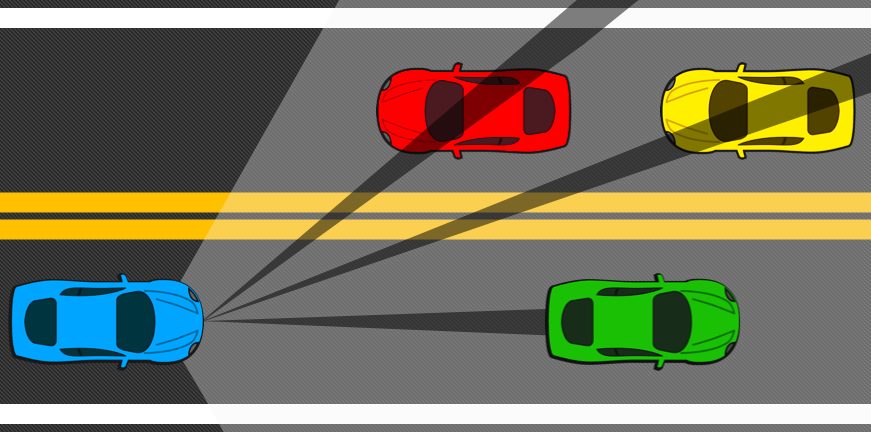
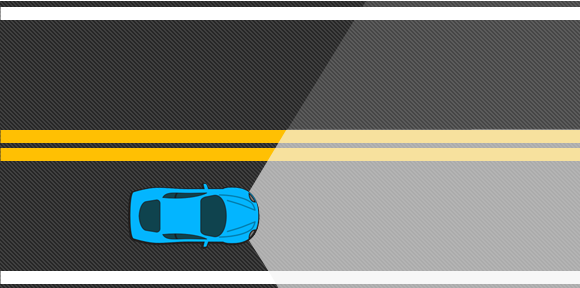
The primary goal of an automotive headlight is to improve safety in low light and poor weather conditions. But, despite decades of innovation on light sources, more than half of accidents occur at night even with less traffic on the road. Recent developments in adaptive lighting have addressed some limitations of standard headlights, however, they have limited flexibility - switching between high and low beams, turning off beams toward the opposing lane, or rotating the beam as the vehicle turns - and are not designed for all driving environments. We introduce an ultra-low latency reactive visual system that can sense, react, and adapt quickly to any environment while moving at highway speeds. Our single hardware design can be programmed to perform a variety of tasks. Anti-glare high beams, improved driver visibility during snowstorms, increased contrast of lanes, and early visual warning of obstacles are demonstrated. [direct link to video summary above]
Overall Approach: The programmable headlight is a co-located imaging and illumination system consisting of a camera, processor, and spatial light modulator (SLM). The camera captures images of the road. The processor analyzes the images and computes and illumination pattern. The SLM modulates light with high resolution over space and time.
High-Speed Spatial Light Modulator: Custom-built spatial light modulator using a DMD development kit and the optics/light source from a DLP projector. Capable of illuminating at frame rates exceeding 1,000 Hz. [direct video link]
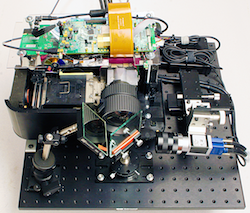
Design of Prototype: Components of the programmable headlight design rigidly mounted to an optical breadboard. Acrylic encasement protects prototype from dirt, dust, and moisture. Suction cups allow prototype to be mounted to vehicle hood for testing. [direct video link]
System Evaluation: The system's three stages are executed in parallel to minimize latency. The latency of the system was measured to be between 1 and 1.5 ms.
Road Testing: The prototype system is mounted to the hood of a vehicle for road testing.
What's Next?: In the near future, slight modifications will be made to the prototype to permit installation within the headlight compartment of a small pick-up truck, e.g., Ford F-150.
Applications
Unlike modern adaptive headlight designs, our design has a single hardware configuration -- with very high spatiotemporal resolution -- that can be programmed to perform many different tasks to adapt to any road environment. Below are several of the automotive tasks that we are currently exploring. Click the images or text below to learn more about them.
"Programmable Automotive Headlights"
Robert Tamburo, Eriko Nurvitadhi, Abhishek Chugh, Mei Chen, Anthony Rowe, Takeo Kanade and Srinivasa G. Narasimhan. European Conference of Computer Vision (ECCV), 2014. Lecture Notes in Computer Science. Volume 8692, 2014, pp 750-765. [pdf]
Presentations
"Programmable Automotive Headlights"
Robert Tamburo, Eriko Nurvitadhi, Abhishek Chugh, Mei Chen, Anthony Rowe, Takeo Kanade and Srinivasa G. Narasimhan. European Conference of Computer Vision (ECCV), 2014.
"Programmable Headlights: One Billion Light Beam Adaptations Per Second"
Srinivasa Narasimhan keynote at Driving Vision News Workshop on Future Lighting Technologies, Techniques, and Regulatory Affairs, January 13, 2015.
In the News
Demonstration for the U.S. Secretary of Transportation Anthony Foxx (April 22, 2015)
This research was funded in parts by a grant from the Intel Science and Technology Center for Embedded Computing, a grant from the U.S. Department of Transportation (Carnegie Mellon University Transportation Center (T-SET)), a gift from Ford Motor Company, a grant from the Office of Naval Research (N00014-11-1-0295), and an NSF CAREER Award (IIS- 0643628). The authors also thank the NavLab group at Carnegie Mellon University, Robotics Institute for providing an experimental vehicle platform, Zisimos Economou for helping with the timing circuit, and Feng Yang, Supreeth Achar, and Subhagato Dutta for helping conduct experiments.
Project Timeline
Timeline of Smart Automotive Headlight Development (click images)
2010 - 2011
2012 - 2013
2014 - present
The smart headlight was born as a stereoscopic system consisting of two monochrome cameras and a DLP projector. The camera /projector speed was 60 Hz and the system had a latency of 70 ms.
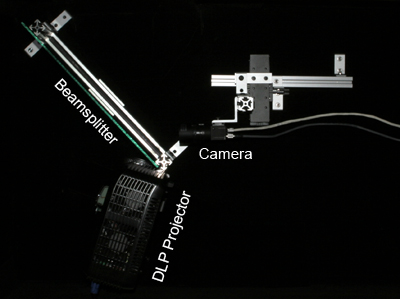
A beam splitter was used to optically co-locate a monochrome camera with a DLP projector. System speed was increased to 120 Hz and latency was reduced to 13 ms.
The system currently under development has a similar setup as the previous system. The camera and projector hardware was upgraded for speeds near 1000 Hz and latency approaching 1 ms.