
After a wonderful decade at CMU, I have moved the the EECS
Department at UC Berkeley in Fall 2013. Please visit my
new web page.
I am originally from
St.
Petersburg, Russia, but, due to some mixup at
the travel agency, I now live in
Pittsburgh, USA.
I got my PhD from
UC
Berkeley in 2003 under the supervision of Jitendra Malik. I then
spent a year as
a fine fellow in
lovely Oxford, working
with Andrew Zisserman and
the Visual Geometry
Group.
Since 2004, I am faculty at CMU with a joint appointment in
the
Robotics Institute
and CS Department (and a courtesy
appointment in
Machine Learning Department).
I am
a member of the CMU Computer Vision
Group
and the
CMU Graphics
Lab, and also have close collaboration with the
WILLOW Lab
at INRIA/ENS in Paris.
Here is a slightly more official bio.
Research
 Antonio Torralba and I
are guest-editing an IJCV special issue
on
Big Visual Data. Submission Deadline: extended to May 31.
Antonio Torralba and I
are guest-editing an IJCV special issue
on
Big Visual Data. Submission Deadline: extended to May 31.
My research is in the area of computer vision and computer graphics,
especially at the intersection of the two. I am particularly
interested in using data-driven techniques to
tackle problems which
are very hard to model parametrically but where large quantities of
visual data, now called "Big Data", are readily available (see my recent
talk on "What Makes Big Visual Data Hard?"). The ultimate
goal is to use the
ever-growing amount of stored visual information (digital photo
albums, webcams, movies, etc.) to learn, understand, and resynthesize
the visual world around us.
In very broad strokes, here are the main current themes of my
group's research:
-
Qualitative Reasoning for Image Understanding: The ability to
see and understand the three-dimensional world behind a
two-dimensional image goes to the very heart of the computer vision
problem. The overall objective of this research effort is, given a
single image, to automatically produce a coherent
interpretation of the depicted scene. On one level, such
interpretation should be able to qualitativly capture scene properties
such as geometric layout, occlusion relationships, camera viewpoint,
scale, illumination, geographic properties, etc. But more than that,
the goal is to capture the overall qualitative sense of the
scene. For an overview, see my recent keynote
lecture at BMVC'09.
-
Building the "Visual Memex": What could you do with a billion
images? Can this vast heap of data be organized without loosing its
representation power? Taking inspiration from Vannevar Bush's
memex, our
aim is to utilize the huge amount of existing visual data to discover
links and connections between all visual elements, i.e. a giant
multi-graph. Once constructed, the visual memex can be used to
"explain" novel visual signal not in terms of hard categories ("car",
"chair", "city"), but rather in terms of what has been seen before.
Rather than asking "What is this?", we'd like to ask "What is
this like?". For an overview, see my recent
presentation and representative publications:
Malisiewicz'08,
Malisiewicz'09,
Hays'08,
Russell'09,
Malisiewicz'11,
Shrivastava'11.
-
Understanding (and Faking) Visual Realism: Why is it that most
computer-generated imagery doesn't look very realistic? What is it
that the Renaissance artists knew that we don't? Which bits of the
visual experience is it important to "get right", and which could be
safely faked without anyone noticing? The ultimate goal is to make
synthesized images appear as real and convincing as regular
photographs. Representative publications:
Lalonde'07,
Lalonde'07b,
Hays'07,
Lalonde'09.
Postdocs
Graduate Students
Former PhD Students
- Dr. Santosh Kumar
Divvala (Robotics, PhD 2012, now postdoc at University of Washington),
co-advised with Martial Hebert
- Dr. Tomasz Malisiewicz
(Robotics, PhD 2011, now postdoc at MIT)
- Dr. Jean-François
Lalonde (Robotics, PhD 2011, now postdoc at Disney Research),
co-advised with Srinivas Narasimhan
-
Dr. James Hays
(CSD, PhD 2009, now assistant professor at Brown)
-
Dr. Derek Hoiem
(Robotics, PhD 2007, now assistant professor at UIUC), co-advised with Martial Hebert
Former Postdocs
Teaching
Selected Projects
List of all my publications is also available on
Google
Scholar.

|
What makes Paris look like Paris?
Carl Doersch,
Saurabh
Singh,
Abhinav Gupta,
Josef Sivic,
Alexei A. Efros
in SIGGRAPH 2012
Source code
available
Watch the video
|

|
Unsupervised Discovery of Mid-Level Discriminative Patches
Saurabh
Singh,
Abhinav Gupta,
Alexei A. Efros
in ECCV 2012
Source code available
|

|
People Watching: Human Actions as a Cue for Single View
Geometry
David Fouhey,
Vincent Delaitre,
Abhinav Gupta,
Alexei A. Efros,
Ivan Laptev,
Josef Sivic
in ECCV 2012
Watch the video
|

|
Scene Semantics from Long-term Observation of People
Vincent Delaitre,
David Fouhey,
Ivan Laptev,
Josef Sivic
Abhinav Gupta,
Alexei A. Efros
in ECCV 2012
|

|
Dating Historical Color Images
Frank Palermo,
James Hays,
Alexei A. Efros
in ECCV 2012
Partial source code
available
|
|
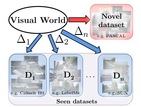
Undoing the Damage of Dataset Bias
Aditya Khosla,
Tinghui
Zhou,
Tomasz Malisiewicz,
Alexei A. Efros,
Antonio Torralba
in ECCV 2012
|

|
Connecting Missing Links: Object Discovery from Sparse Observations using 5 Million Product Images
Hongwen (Henry) Kang,
Martial Hebert, Alexei A. Efros,
Takeo
Kanade
in ECCV 2012
|

|
Object Instance Sharing by Enhanced Bounding Box Correspondence
Santosh Divvala,
Alexei A. Efros,
Martial Hebert
in BMVC'12
|

|
How important are Deformable Parts in the Deformable Parts
Model?
Santosh Divvala,
Alexei A. Efros,
Martial Hebert
Parts and Attributes Workshop (at
ECCV'12)
|

|
Data-driven Visual Similarity for Cross-domain Image Matching
Abhinav Shrivastava,
Tomasz Malisiewicz,
Abhinav Gupta,
Alexei A. Efros
in SIGGRAPH Asia 2011
Watch the video
|

|
Ensemble of Exemplar-SVMs for Object Detection and Beyond
Tomasz Malisiewicz,
Abhinav Gupta,
Alexei A. Efros
in ICCV 2011
Source code available
ICML'12 invited applications talk
(see Extended
Abstract)
|

|
From 3D Scene Geometry to Human Workspace
Abhinav Gupta,
Scott Satkin,
Alexei A. Efros,
Martial Hebert
in CVPR 2011
Watch video
|

|
Unbiased Look at Dataset Bias
Antonio Torralba,
Alexei A. Efros
in CVPR 2011
|

|
Blocks World Revisited: Image Understanding using Qualitative
Geometry and Mechanics
Abhinav Gupta,
Alexei A. Efros,
Martial Hebert
in ECCV 2010
ECCV Best Paper Honorable Mention
Source code available
|

|
Detecting Ground Shadows
in Outdoor Consumer Photographs
Jean-François
Lalonde,
Alexei A. Efros,
Srinivasa G. Narasimhan
in ECCV 2010
Source code available
|

|
Beyond Categories: The Visual Memex Model for Reasoning About
Object Relationships
Tomasz Malisiewicz,
Alexei A. Efros
in NIPS 2009.
|

|
Segmenting Scenes by Matching Image Composites
Bryan Russell,
Alexei A. Efros,
Josef Sivic,
Bill Freeman,
Andrew Zisserman
in NIPS 2009
Source code available
|

|
Webcam Clip Art: Appearance and Illuminant Transfer from
Time-lapse Sequences
Jean-François
Lalonde,
Alexei A. Efros,
Srinivasa G. Narasimhan
in SIGGRAPH Asia 2009
Source code available
Watch the
video
|

|
Image Composition for Object Pop-out
Hongwen (Henry) Kang,
Alexei A. Efros,
Takeo
Kanade,
Martial Hebert
Workshop on 3D Representation for Recognition (3dRR-09) (at ICCV
2009)
|

|
Estimating Natural Illumination from a Single Outdoor Image
Jean-François
Lalonde,
Alexei A. Efros,
Srinivasa G. Narasimhan
in ICCV 2009
(see expanded journal version in IJCV 2012)
Source code available
|

|
Image Sequence Geolocation with Human Travel Priors
Evangelos Kalogerakis,
Olga Vesselova,
James Hays,
Alexei A. Efros,
Aaron Hertzmann
in ICCV 2009
|

|
An Empirical Study of Context in Object Detection
Santosh Kumar Divvala,
Derek Hoiem,
James Hays,
Alexei A. Efros,
Martial Hebert
in CVPR 2009
|

|
What Does the Sky Tell Us About the Camera?
Jean-François
Lalonde,
Srinivasa G. Narasimhan,
Alexei A. Efros.
in ECCV 2008
(see expanded
journal version, IJCV
2009)
Source code available
|

|
Can Similar Scenes help Surface Layout Estimation?
Santosh Kumar Divvala,
Alexei A. Efros,
Martial Hebert
in IEEE Workshop on Internet Vision (at CVPR'08)
|

|
Recognition by Association via Learning Per-exemplar Distances
Tomasz Malisiewicz,
Alexei A. Efros
in CVPR 2008.
Source code available
|

|
im2gps: estimating geographic information from a single image
James Hays,
Alexei A. Efros
in CVPR 2008.
Flickr download code
available
See
interview with Hays on Pittsburgh TV station. And
another one.
|

|
Closing the Loop on Scene Interpretation
Derek Hoiem,
Alexei A. Efros,
Martial Hebert
in CVPR 2008.
See
3D reconstruction compared to Photo Pop-up and Make3D
|

|
Image-based Shaving
Minh Hoai
Nguyen,
Jean-François
Lalonde, Alexei A. Efros,
Fernando de la Torre
in Eurographics 2008.
|

|
Recovering Occlusion Boundaries from a Single Image
Derek Hoiem,
Andrew Stein,
Alexei A. Efros,
Martial Hebert
in ICCV 2007.
(see expanded journal version in IJCV 2011)
Source code available
|

|
Using Color Compatibility for Assessing Image Realism
Jean-François
Lalonde,
Alexei A. Efros
in ICCV 2007.
|

|
Improving Spatial Support for Objects via Multiple Segmentations
Tomasz Malisiewicz,
Alexei A. Efros
in BMVC 2007.
|

|
Scene Completion using Millions of Photographs
James Hays,
Alexei A. Efros
in SIGGRAPH 2007.
Flickr download code
available
See article
on BBC News
See also Communications of the ACM
article with
forward by Marc Levoy
|

|
Photo Clip Art
Jean-François
Lalonde,
Derek Hoiem,
Alexei Efros,
Carsten Rother,
John Winn,
Antonio Criminisi
in SIGGRAPH 2007.
Try the Live
Java Demo
Watch the
video
|

|
Putting Objects in Perspective
Derek Hoiem,
Alexei A. Efros,
Martial Hebert
In CVPR 2006.
Source code available
CVPR Best Paper Award
(see also expanded journal version, IJCV 2008)
|

|
Using Multiple Segmentations to Discover Objects and their
Extent in Image Collections
Bryan Russell,
Alexei A. Efros,
Josef Sivic,
Bill Freeman,
Andrew Zisserman
in CVPR 2006
Source code
available
|


|
Discovering Texture Regularity as a Higher-Order Correspondence
Problem
James Hays,
Marius
Leordeanu,
Alexei A. Efros,
Yanxi Liu
in ECCV 2006
Source code available upon
request.
|

|
Geometric Context from a Single Image
Derek Hoiem,
Alexei A. Efros,
Martial Hebert
In ICCV 2005
(see also
expanded journal version, IJCV 2007)
Executable available
(for non-commerical use only)
|


|
Discovering Objects and thier Location in Images
Josef Sivic,
Bryan Russell,
Alexei A. Efros,
Andrew Zisserman,
Bill Freeman
In ICCV 2005
|

|
Automatic Photo Pop-up
Derek Hoiem,
Alexei A. Efros,
Martial Hebert
In SIGGRAPH 2005
See article in The Economist
|

|
A Data-Driven Approach to Quantifying Natural Human Motion
Liu Ren,
Alton Patrick,
Alexei A. Efros,
Jessica Hodgins.
James Rehg.
In SIGGRAPH 2005
|

|
Seeing Through
Water
Alexei A. Efros,
Volkan Isler,
Jianbo Shi,
Mirko Visontai
In NIPS 17, 2004
Data available as
frames or
video
|



|
Recovering Human Body Configurations: Combining Segmentation and
Recognition
Greg Mori,
Xiaofeng Ren,
Alexei A. Efros,
Jitendra Malik
In CVPR 2004
|

|
Recognizing Action at a Distance
Alexei A. Efros,
Alexander Berg,
Greg Mori,
Jitendra Malik
In ICCV 2003
|


|
Image Quilting for Texture Synthesis and Transfer
Alexei A. Efros,
Bill Freeman
In SIGGRAPH 2001
Source code available
|


|
Texture Synthesis by Non-parametric Sampling
Alexei A. Efros,
Thomas
Leung
In ICCV 1999
|
Funding Sources
Misc.

since Jan 2007.
|

{kind=link}
{kind=link}
{kind=link}