16-899 Subterranean Robotics Spring 2004
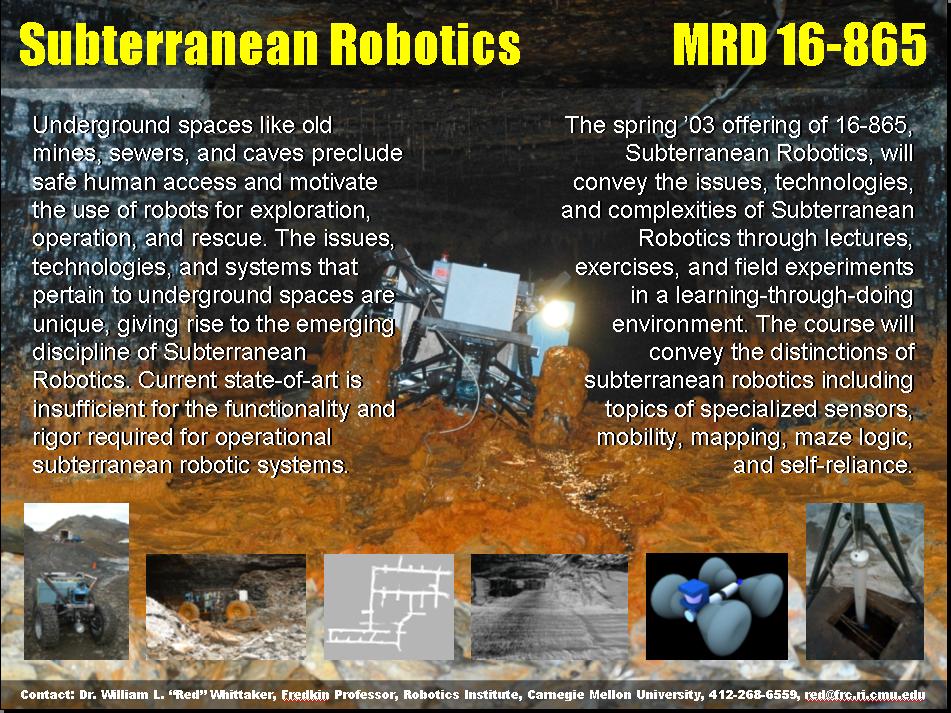
Flooded subterranean voids such as old mines, sewers, and
caves preclude safe human access and motivate the use of
robots for exploration, operation, and rescue. The issues,
technologies, and systems that pertain to wet underground
spaces are unique to a class of mobile machines within the
emerging discipline of Subterranean Robotics. Current state-of-the-art
is insufficient for the functionality and reliability required
for submersible subterranean robots.
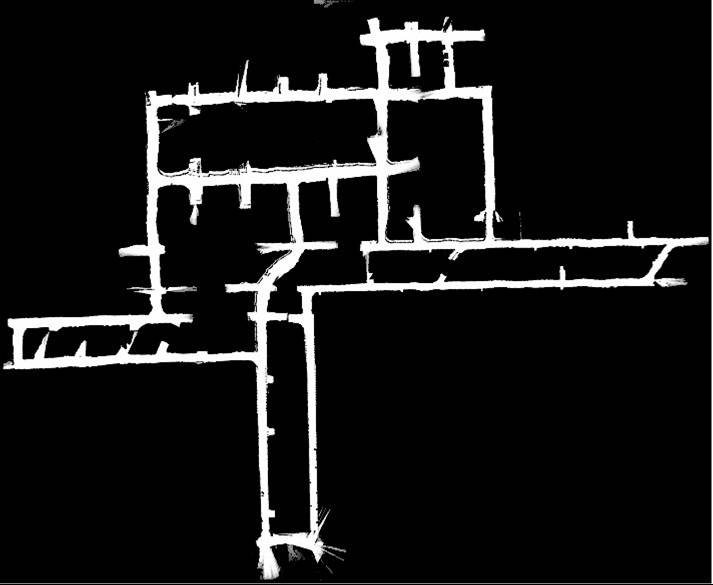
The Spring 2004 offering of Subterranean Robotics (16-899C)
will address the issues, technologies, and complexities
of robot locomotion, localization, and mapping within flooded
subterranean voids. Students will design and prototype an
autonomous mine mapping robot and deploy and operate the
machine within a flooded mine subject to course timeframes.
|