![]()
Byung-Cheol Min, Ph.D.
Postdoctoral Fellow, Carnegie Mellon University
|
|
|||||
|
Byung-Cheol Min, Ph.D. Postdoctoral Fellow, Carnegie Mellon University
|
|
||||||||||||
|
Research |
|
|
Robotic Leader-Follower System using Bearing-only Tracking with Directional Antennas (2012 - 2014) This research presents the development of a robotic follower system with the eventual goal of autonomous convoying to create end-to-end communication. The core of the system is a bearing-only tracking with directional antennas and an obstacle avoidance algorithm with sonar sensors. For bearing estimation with directional antennas, we employ a Weighted Centroid Algorithm (WCA), which is a method for active antenna tracking and Direction Of Arrival (DOA) estimation. We also discuss the use of sonar sensors that can detect objects, which could improve our robotic follower system in mobile robot navigation. Through extensive field experiments in different environments, we show feasibilities of our proposed system, allowing a follower robot to track a leader robot effectively in convoying fashion. We expect that our system can be applied in a variety of applications that need autonomous convoying.
|
* Click the image above to watch video. OR, watch more on my YouTube [link1] [link2].
|
|
Establishment of End-to-End Wireless Network with Mobile Robots (2011 - 2014) In this research we tackle the fundamental problem of finding the optimal location and allocation of mobile robots to establish an immediate end-to-end communication. We first formulate an end-to-end communication problem, in a general optimization form, with constraints that consider the operation of robots and the types of antennas. Additionally, constraints on the propagation of radio signals and infeasible locations of robots within physical obstacles are also taken into consideration for a dense space. Then, we present two optimization techniques applied to this problem: Genetic Algorithm (GA) and Particle Swarm Optimization (PSO). Thereafter, by means of applying GA and PSO to the simulated environments, and investigating their convergence and efficiency, we show their effectiveness for the multi-robot deployment problem in networked robots.
|
* Click the image above to watch video. |
|
Design of a Networked Robotic System Capable of Enhancing Wireless Communication Capabilities (2012 - 2014) This research directly focuses on problems where high quality and distant range wireless communication technology is required in mobile robotics. For these problems, we develop a networked robotic system capable of enhancing wireless capabilities. The core of the system is active antenna tracking with directional antennas. The proposed system is decentralized and consists mainly of a mobile robot system and a command center system. Each system is equipped with off-the-shelf network devices such as antennas, access points (AP), and network switches. We expect that our system can be applied in a variety of rescue, surveillance, and emergency scenarios where high bandwidth and long distance communications are needed.
|
* Click the image above to watch video. |
|
Radio Source Localization with Directional Antenna (2011 - 2014) The objective of this research is to introduce directional antennas as a directional finder that would be able to sense its surrounding environment. We began by summarizing the advantages and disadvantages of using directional antennas for source localization or Direction of Arrival (DOA) estimation. Because of the presence of walls and other objects that act as reflectors and scatters, the received signal consisted of multiple copies of the transmitted signal arriving via different paths. This necessitated some filtering of the received signal to remove interference. We proposed a novel DOA estimation called the WCA (Weighted Centroid Algorithm), which only requires a single rotating directional antenna and one round scanning task. Through a set of theoretical analysis, WCA achieved the narrowest variance and the fastest response time for DOA estimation among previously introduced DOA estimation methods such as the simple minimization method, a moving average filter, and polynomial curve fitting. By showing comparisons between the WCA and polynomial curve fitting, we determined that the WCA is very robust and outperforms other estimation methods.
|
* Click the image above to watch video. OR, watch more on my YouTube [link]. |
|
Rapid Establishment of Point-to-point Broadband Network Using Heuristic Optimization Techniques (2011 - 2013) The objective of this research is to establish a rapid point-to-point broadband network with rotatable directional antennas. When using directional antennas for the broadband network, it is very important to determine the best orientation of the antennas to receive a quality wireless signal. With the effects of multipath and the presence of other wireless interference, it is hard to predict or calculate the best orientation for a directional antenna without adequate data regarding their effects. In addition, when directional antennas are deployed randomly in unknown environments, it is almost impossible to acquire all of the information necessary to create an adequate connection. Given the complex and numerous issues, this belongs to the class of NP-complete problems. Thus, we introduce four heuristic optimization techniques: Pattern Search Method, Downhill Simplex Method, DIRECT Method, and Genetic Algorithm. Since these techniques do not require any knowledge of the objective function gradient and only require sampling points in the domain, they are applicable for this self-orientation of directional antennas problem. Thus, we apply the four techniques to the problem and show a comparison between them with results from a set of simulations as well as real world experiments. We also include a study of the performance and limitations of each technique.
|
* Click the image above to watch video. OR, watch more on my YouTube [link]. |
|
Using Mobile Robots to Establish Mobile Wireless Mesh Networks and Increase Network Throughput (2011 - 2011) The motivation for this research is to demonstrate that it is possible to establish a mobile broadband wireless network using mobile robots and wireless mesh technology. The proof-of-concept is evaluated through a two-stage experiment of which the first stage, a wireless mesh network, is established in a linear topology. In the second stage of the experiment, we demonstrate the ability for a robot to redistribute autonomously the network to reduce the hop count network traffic transit, which results in an increase in throughput. The increase in throughput allows for more devices and units to exist on the network and to communicate and transmit data in a timely manner. We hope that through the use of the simple concept of RF sensing, the concept of mobile broadband mesh network can be further developed and matured to be implemented on different robotic platforms paving way to a new era of wireless communication and services by providing wireless communication almost anywhere and at anytime in the world.
|
|
|
Adaptive Robust Control for Quad-rotor UAV (2010 - 2011) This research deals with an altitude controller of a quadrotor type UAV with an unknown total mass of the structure. We assume that the uncertainty results from the flight mission in which the UAV carries unknown payloads. Since the quadrotor type UAV involves both translational and rotational motions due to its inherent dynamics, it is of importance to know accurate information on the vehicle’s the moment of inertia and the total mass in order to guarantee the UAV’s attitude and position controls. An Adaptive Robust Control (ARC) is utilized to compensate for the parametric uncertainty. Then, Lyapunov based stability analysis shows that the proposed control design guarantees asymptotic tracking error for the UAV’s altitude control. Numerical simulation results which are time-based are presented to illustrate the good tracking performance of the designed control law.
|
* Click the image above to watch video. OR, watch more on my YouTube [link]. |
|
Violin Playing Robot (2008 - 2011) The aim of this study was to determine how the violinist robot could produce a good quality of violin sounds. We began our study with the basic physics of producing sound with a violin. We found three parameters that influenced the quality of the sound produced by the violin; the bowing force, the bowing velocity and the sounding point. In particular, the bowing force was found to be the most important parameter in producing good sounds. Furthermore, to produce such sounds, a same amount of the bowing force must be applied on the contact point between a bow and a string. However, it is hard to keep a same amount of the bowing force on the contact point due to inherent characteristics of a bow. Thus, we primarily focused on the bowing force by considering bowing a string as a spring-mass system. Then, we devised a passive damper device to offset variables in the spring-mass system that may result in changing the bowing force on the contact point. We then validated our methodology with the violinist robot, a human-like torso robot.
|
* Click the image above to watch video. OR, download the video file [link]. |
|
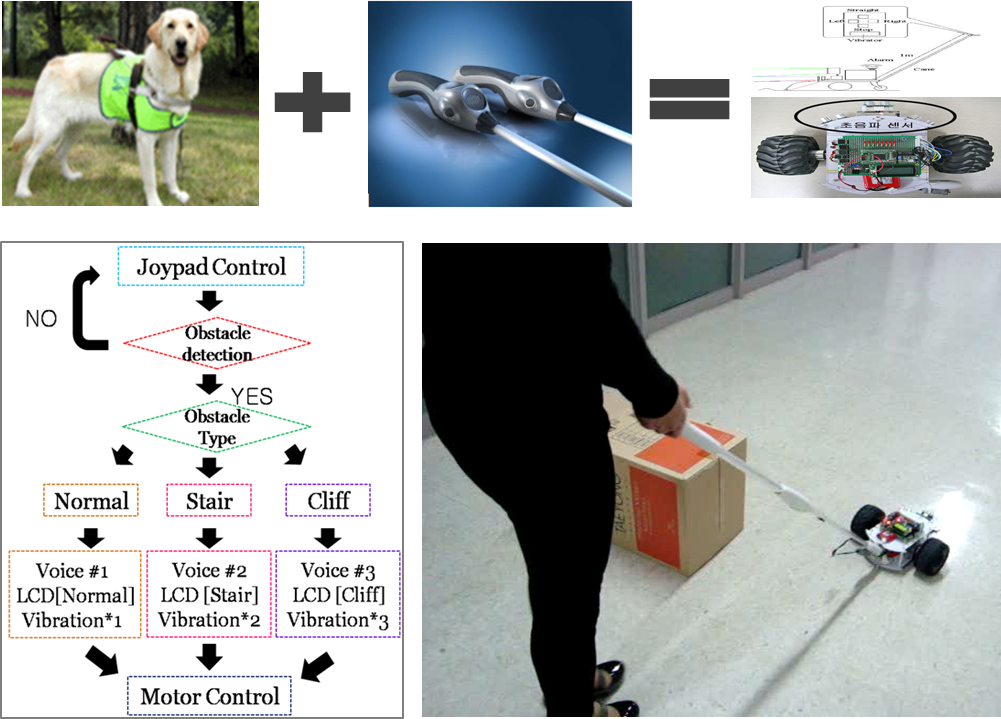
Assistive Robotic Systems (2008 - 2010) The goal of this project was to develop a guide robot to assist a blind person in walking. This robot was designed with the hope of use by those of who are not able to afford or accommodate a guide dog. The main function of this robot is its GPS-enabled localization capability, which localizes the user and thus allows one to go toward the desired location with a planned route. In addition, the robot is equipped with an obstacle avoidance algorithm and voice and haptic warning systems, which are almost the same as that provided by a real guide dog. When sonar sensors detect objects on the path while in motion, the robot stops and warns the user verbally and with a vibration of the handle. Subsequently, the robot re-plans a safe path toward the destination.
|
* Click [link] to watch video on my YouTube. |
|
Your location: Home >> Research |
© 2015 Byung-Cheol Min |