|
I recently completed my PhD at the Robotics Institute at Carnegie Mellon University, where I worked with Michael Kaess in the Robotics Perception Lab. My research interests span robotics, computer vision, and machine learning, with a focus on developing new methods for perception, statistical inference, and decision-making in challenging real-world environments. I completed my Masters in Robotics at CMU working with George Kantor on SLAM in agricultural environments. Previously, I worked with Simon Lucey and Laszlo Jeni on monocular 3D reconstruction. In my undergrad, I majored in Electrical Engineering at the University of Maryland - College Park. Email / CV / Google Scholar / LinkedIn / Github |

|
|
|
| [June '26] | Our paper TouchAnything: Diffusion-Guided 3D Reconstruction from Sparse Robot Touches was accepted to the ECCV 2026! |
| [June '26] | I successfully defended my PhD thesis, Integrating Structured Learning for State and Geometry Estimation! (Thesis link coming soon.) |
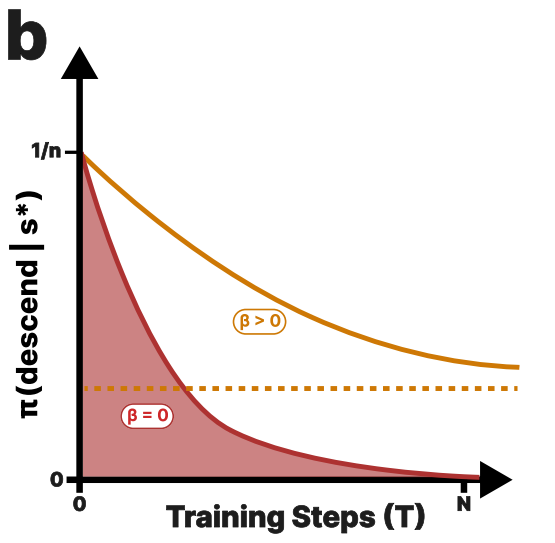
| [May '26] | Our paper Overcoming Valid Action Suppression in Unmasked Policy Gradient Algorithms was accepted to the Reinforcement Learning Journal (RLJ 2026). |
| [Sep '25] | I started an internship at NVIDIA in Santa Clara, CA. |
| [July '25] | Our paper Acoustic Neural 3D Reconstruction Under Pose Drift was accepted to IROS 2025. |
| [May '25] | I started a research internship at Meta Reality Labs in Redmond, WA. |
| [May '25] | Our paper Your Learned Constraint is Secretely a Backward Reachable Tube was accepted to the Reinforcement Learning Journal (RLJ 2025). |
|
|
| Learning and Optimization | |
|
Renos Zabounidis, Roy Siegelmann, Mohamad Qadri, Woojun Kim, Simon Stepputtis, Katia P. Sycara RLJ, 2026 paper We show that unmasked policy gradient methods can suppress rarely valid but task-critical actions, and propose feasibility classification to enable robust deployment without oracle action masks. |

|
Mohamad Qadri, Gokul Swamy, Jonathan Francis, Michael Kaess, Andrea Bajcsy RLJ, 2025 paper / code We prove that learned constraints, using Inverse Constraint Learning (ICL) algorithms, correspond to a dynamics-dependent Backward Reachable Tube (BRT) rather than a failure set. |
|
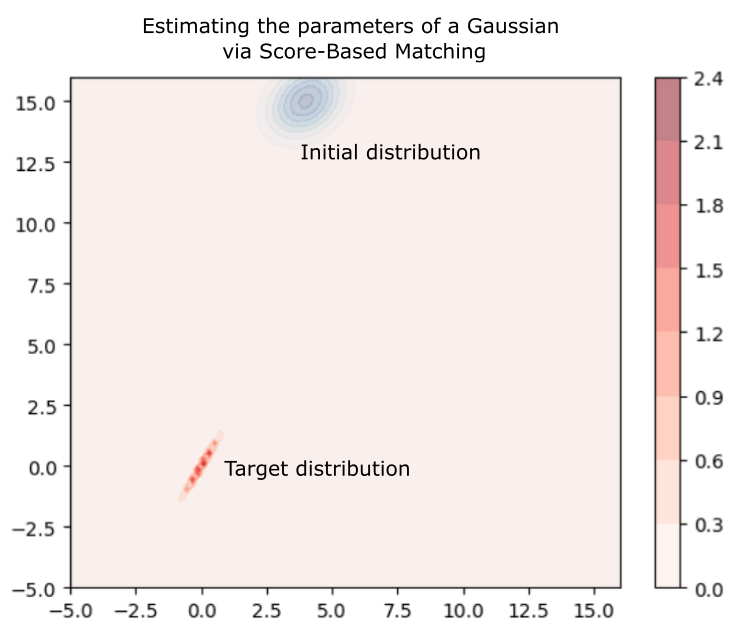
Mohamad Qadri, Zachary Manchester, Michael Kaess ICRA, 2024 arXiv / video We propose a gradient-based method for well-conditioned covariance estimation, as a bilevel optimization on factor graphs. |
|
|
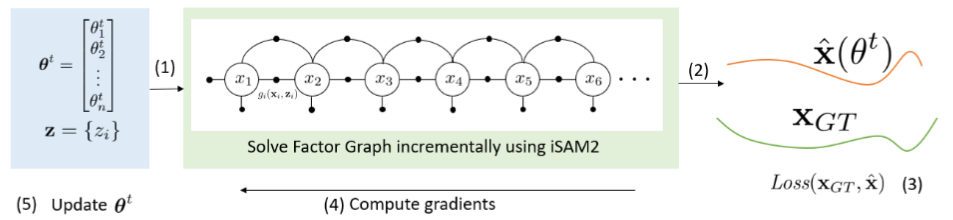
Mohamad Qadri, Michael Kaess ICML (DAE Workshop), 2023 arXiv We propose a method to learn observation models for state estimation even with non-differentiable optimizers. |

|
Mohamad Qadri, Paloma Sodhi, Joshua Mangelson, Frank Dellaert, Michael Kaess IROS, 2022 paper / video / code We present an Augmented Lagrangian-based incremental constrained optimizer that views matrix operations as message passing over the Bayes tree. |
| 3D Reconstruction | |
|
Langzhe Gu, Joe Huang*, Mohamad Qadri*, Michael Kaess, Wenzhen Yuan ECCV, 2026 paper / website In this work, we show that large-scale pretrained 2D vision diffusion models can serve as such priors for tactile-based 3D reconstruction. TouchAnything combines local tactile consistency with global diffusion-based geometric guidance to reconstruct object geometry from sparse robot touches. |
 |
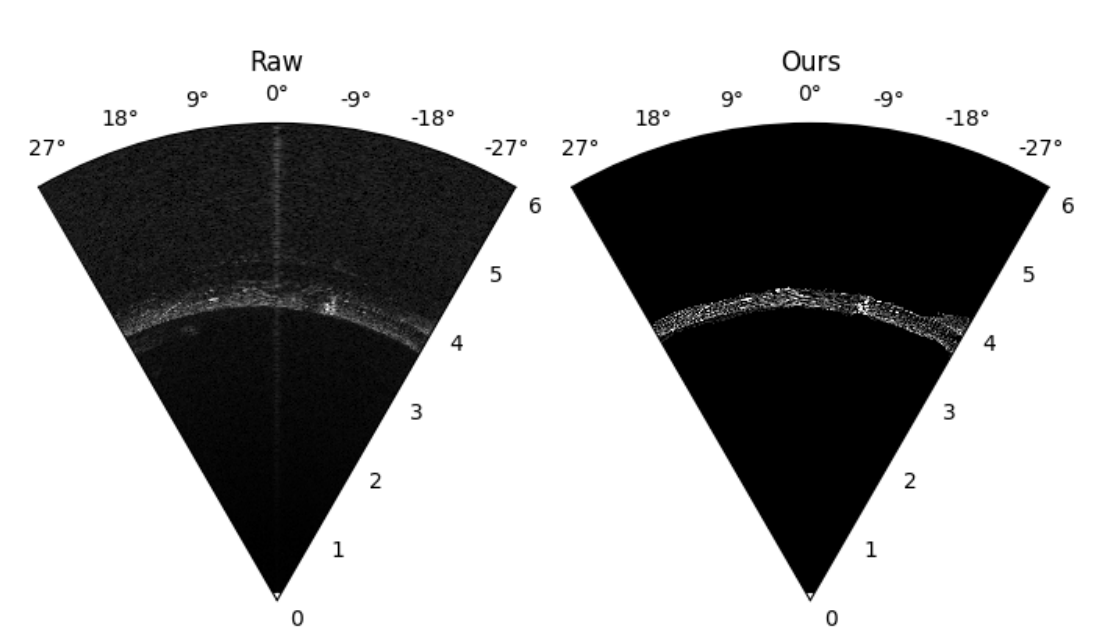
Tianxiang Lin*, Mohamad Qadri*, Kevin Zhang, Adithya Pediredla, Christopher A. Metzler, Michael Kaess IROS, 2025 arXiv We tackle the challenge of accurate acoustic 3D reconstruction under drifting and noisy sensor pose by jointly optimizing the neural scene representation and sensor (sonar) poses. Our method enables high-fidelity reconstructions even under significant pose drift. |
 |
Ziyuan Qu, Omkar Vengurlekar, Mohamad Qadri, Kevin Zhang, Michael Kaess, Christopher Metzler, Suren Jayasuriya, Adithya Pediredla TPAMI, 2024 arXiv We extend Gaussian splatting to sonar cameras and propose fusion with RGB data for robust 3D reconstruction. |
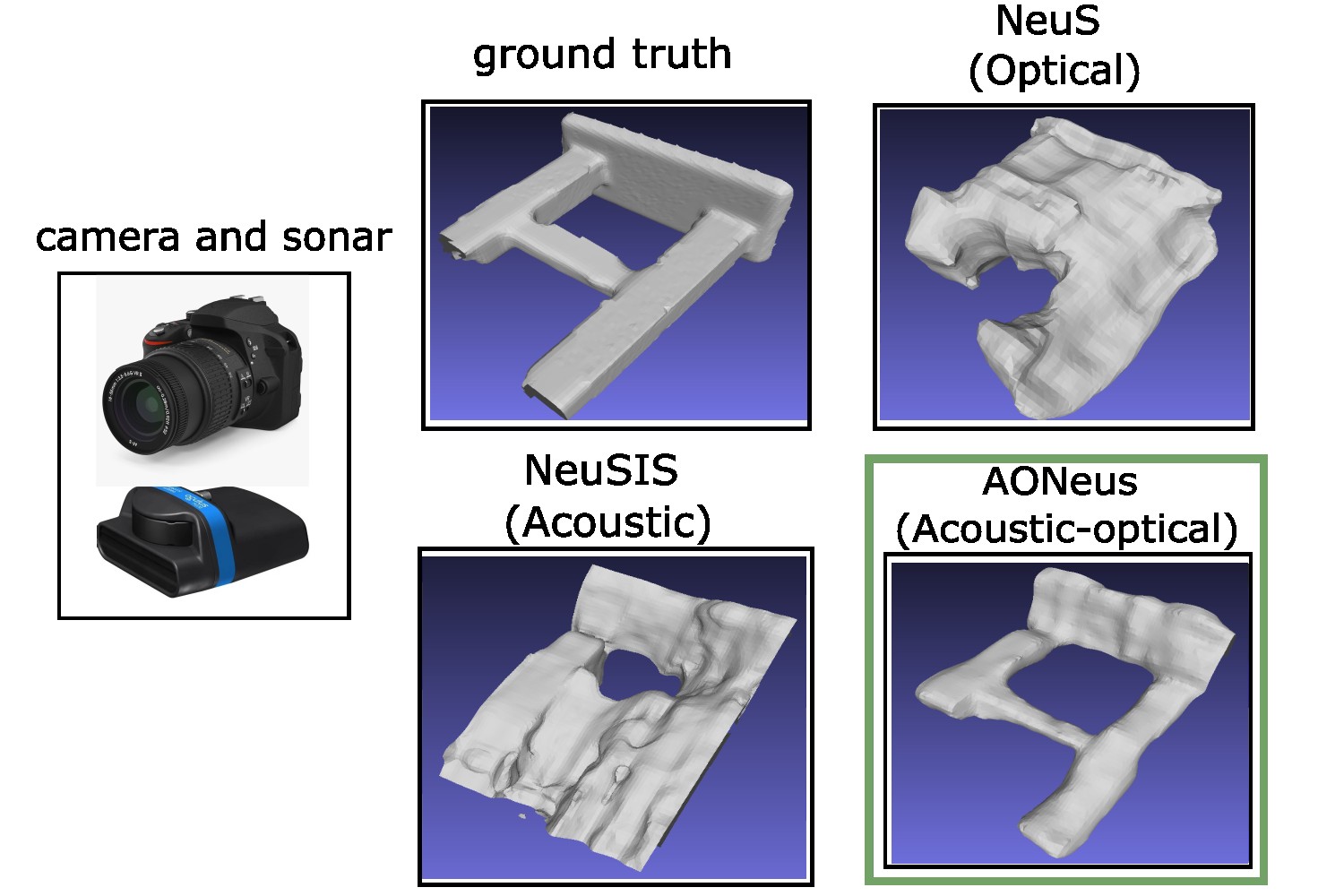 |
Mohamad Qadri*, Kevin Zhang*, Akshay Hinduja, Michael Kaess, Adithya Pediredla, Christopher Metzler SIGGRAPH, 2024 arXiv We fuse acoustic and optical measurements for high-resolution 3D surface reconstruction, even under limited baselines. |
|
Mohamad Qadri, Michael Kaess, Ioannis Gkioulekas ICRA, 2023 arXiv / video / code Dense 3D reconstruction of objects using imaging sonar, with neural implicit functions. |
|
 |
Tianxiang Lin, Akshay Hinduja, Mohamad Qadri, Michael Kaess ICRA, 2023 arXiv / video Application of cGANs to produce noise-free sonar images for improved underwater mapping. |
| Path Planning | |
 |
Mohammad Bakhshalipour, Mohamad Qadri, Seyed Borna Ehsani, Dominic Guri, Maxim Likhachev, Phillip B. Gibbons ICAPS, 2023 We introduce Runahead A*, a form of speculative parallelism for speeding up A* search in planning tasks. |
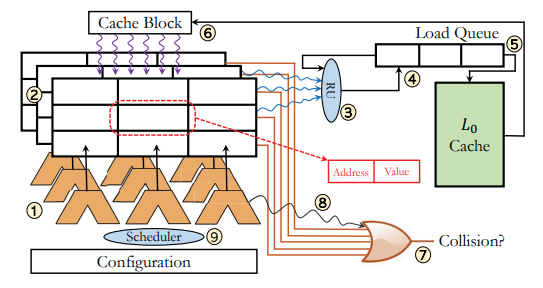 |
Mohammad Bakhshalipour, Seyed Borna Ehsani, Mohamad Qadri, Dominic Guri, Maxim Likhachev, Phillip B. Gibbons ISCA, 2022 paper Joint algorithm/hardware co-design for path planning, with CODAcc hardware and the RASExp algorithm for parallel exploration. |
| Agricultural Robotics, Vision & Mapping | |
|
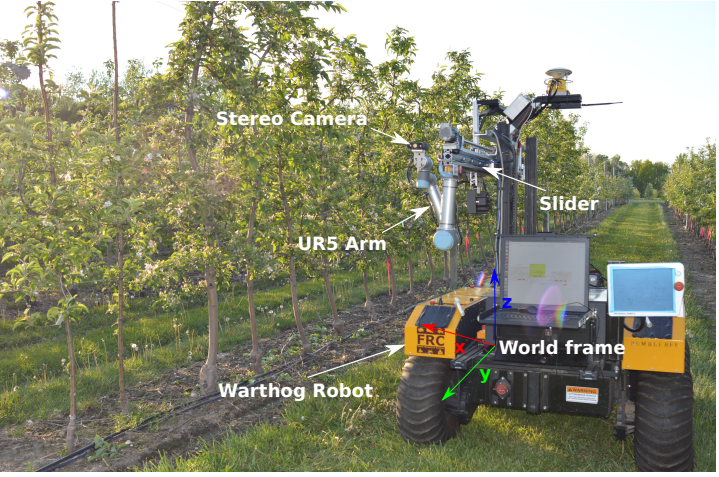
Harry Freeman, Mohamad Qadri, Abhisesh Silwal, Paul O'Connor, Zachary Rubinstein, Daniel Cooley, George Kantor Under Review arXiv / video Tracking and sizing apple fruitlets using deep learning and attentional graph neural networks across growth periods. |
|
 |
Mohamad Qadri, Harry Freeman, Eric Schneider, George Kantor AIAFS AAAI, 2021 paper / video Using semantics and environmental priors for accurate 3D mapping of agricultural environments. |
 |
Mohamad Qadri Masters thesis paper |
| Other Projects | |
 |
Ye Won Byun, Mohamad Qadri pdf / code |
 |
Mohamad Qadri, Maggie Collier pdf / code |
 |
Mohamad Qadri, Chiheb Boussemma |
 |
Mohamad Qadri |