Micron 2
Manipulator
DesignManipulator Mechanism VideoControl
Piezoelectric actuators
have many good properties notwithstanding, the precision of tool tip
manipulation and stability of the controller are complicated by the
hysteretic behavior of the piezoelectric material. To avoid complicated
stability and sluggish performance issues of an adaptive closed-loop
control scheme, we implemented an open-loop feedforward controller with
inverse hysteresis model. The main
idea is to obtain a mathematical model that closely describes the complex
hysteretic behavior, and then to feedforward the inverse model to
linearize the actuator response.
To complicate the modeling issue further, hysteresis of a piezoelectric actuator is rate-dependent.
Most hysteresis models
are based on elementary rate-independent operators and are not suitable
for modeling actuator behavior across a wide frequency band. This work
proposes a rate-dependent modified Prandtl-Ishlinskii (PI) operator to
account for the hysteresis of a piezoelectric actuator at varying
frequency. We have shown experimentally that the relationship between the
slope of the hysteretic loading curve and the rate of control input can be
modeled by a linear function. The proposed
rate-dependent hysteresis model is implemented for open-loop control of a
piezoelectric actuator. In experiments tracking multi-frequency
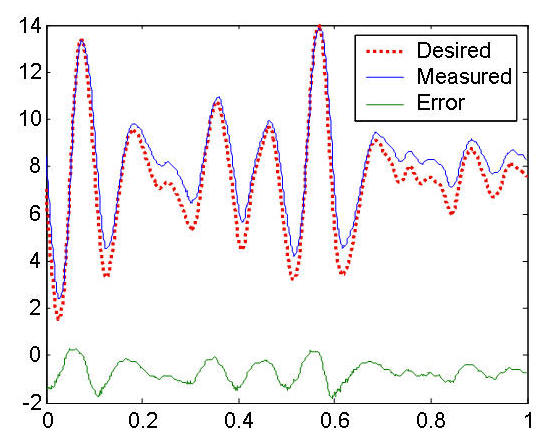
nonstationary motion profiles and real recorded 1-DOF tremor, it
consistently outperforms its rate-independent counterpart by a factor of
two in maximum error and a factor of three in rms error.
Fig. 3. Experimental open-loop tracking results for real tremor. The rate-independent model parameters are identified from the measured response of the piezoelectric actuator
subjected to a 10 Hz, 12.5 mm p-p sinusoidal
input. Publications: 1.
Modeling
Rate-dependent Hysteresis in Piezoelectric Actuators
Proc. IEEE/RSJ Intl. Conf. Intelligent Robots and Systems, October,
2003 |