Home
Research
Principles
* Motor Control
Robotics
Projects
Publications
Students
Teaching
 |
Impact
on
|
If fundamental principles of legged dynamics and control exist,
they should apply to human locomotion as well and, in effect,
should have a strong impact on human motor control. Little
attention has however been paid to this connection between
principles and motor control. I am interested in
understanding it.
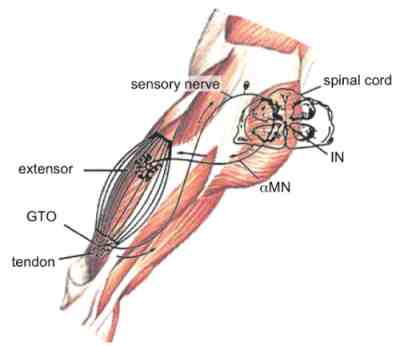 |
Figure 1
A muscle reflex that generates and stabilizes compliant leg
behavior
The natural candidates for a connection between principles of
legged dynamic systems and human motor control are muscle
reflexes. Muscle reflexes can map sensory information that
represents legged mechanics directly onto the activation of leg
muscles bypassing central motor input.
We showed in a simulation study that the compliant leg behavior fundamental to the dynamics of walking and running can be generated and stabilized with a simple reflex: positive force feedback of the leg extensor muscles. This muscle-reflex system behaves like a mechanical spring in steady-state, but automatically thrusts or brakes in response to ground disturbances. Key to this self-adaptive control is the interplay between the positive feedback and the nonlinear muscle dynamics.
 |
 |
 |
Figure 2
More details about this research can be found in
- H Geyer, A Seyfarth, R Blickhan. Positive force feedback in bouncing gaits? Proc R Soc B 270: 2173?2183, 2003. [PDF]
Systematic expansion into neuromuscular human model that encodes
principles of legged mechanics
The previous example suggests that principles of legged dynamic
systems can effectively be encoded in human motor control by
muscle reflexes. To clarify whether this principled approach
to human motor control can be generalized, we developed a more
detailed neuromuscular human model.
Figure 3 illustrates the evolution of this human model.
Starting from the reliance on compliant leg behavior as a key
principle of legged locomotion, the model evolves into a seven
segment system that is actuated by fourteen muscles.
Throughout this evolution, the control of these muscles is mainly
based on autonomous reflex arcs which encode principles of legged
dynamics and control.
 |
Figure 3
In consequence, this human model neither has central rhythm generators nor does it follow target joint trajectories. It is blind and entirely depends on the interplay of its muscle reflexes with the environment. Yet this model stabilizes into a walking gait, tolerates ground disturbances, and adapts to slopes without parameter interventions (hover mouse pointer over figure 4).
 |
Figure 4
Moreover, the muscle activities predicted by the model closely
match observed activities for some muscles (shown for ankle
muscles in figure 5). These results suggest not only that
the interplay between mechanics and motor control is essential to
human locomotion, but also that human motor output could, for some
muscles, be dominated by neural circuits that encode principles of
legged dynamics and control.
 |
Figure 5
More details about this research can be found in
- H Geyer, HM Herr. A muscle-reflex model that encodes principles of legged mechanics produces human walking dynamics and muscle activities. IEEE Trans Neural Syst Rehabil Eng 18(3): 263-273, 2010. [PDF]
- Download
the 2010 model (available for Academic or Non-Profit Organization Noncommercial research use only).
Generalization to Human Locomotion Behaviors in 3-D Environments
The muscle reflex model generalizes to a
spinal control model that demonstrates steady and transitional
locomotion behaviors in three-dimensional environments including
walking and running, acceleration and deceleration, slope and
stair negotiation, turning, and deliberate obstacle avoidance. The control is organized into ten spinal modules, some of which receive supraspinal input about the desired leg placement. Figure 6 shows three example behaviors. The corresponding video provides more examples and details about the 3-D neuromuscular model.
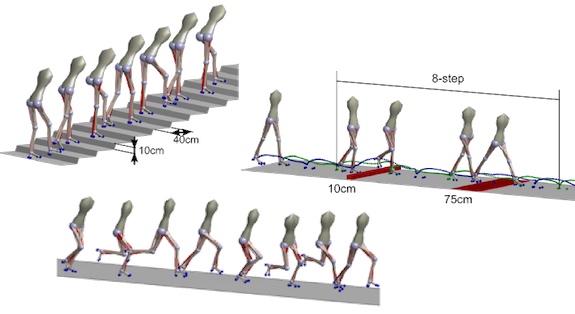 |
Figure 6
A key to this generalization has been our development of reflex-like control strategies for robust swing leg placement under large disturbances using the double pendulum as a fundamental model of swing leg dynamics. Figure 7 sketches the control idea, which operates on leg length and leg angle. The right panel in the figure shows the placement accuracy for different target angles and initial joint speeds. The corresponding video showcases the reaction of the swing leg control to different disturbances.
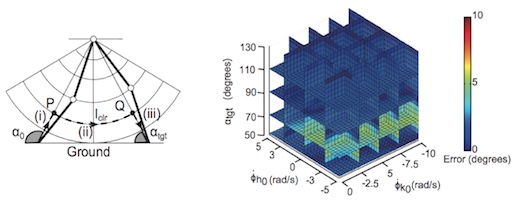 |
Figure 7
More details about this research can be found in
- R Desai, H Geyer. Robust swing leg placement under large disturbances. IEEE International Conference on Robotics and Biomimetics, Guangzhou, China, pp. 265-270, 2012. [PDF]
- R Desai, H Geyer. Muscle-Reflex Control of Robust Swing Leg Placement. IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, pp. 2169-2174, 2013. [PDF]
- S Song, H Geyer. Generalization of a Muscle-Reflex Control Model to 3D Walking. IEEE Annual International Conference of the Engineering in Medicine and Biology Society, Osaka, Japan, pp. 7463-7466, 2013. [PDF]
- S Song, R Desai, H Geyer. Integration of an adaptive swing control into a neuromuscular human walking model. IEEE Annual International Conference of the Engineering in Medicine and Biology Society, Osaka, Japan, pp. 4915-4918, 2013. [PDF]
- S Song, H Geyer. A neural circuitry that emphasizes spinal feedbacks generates diverse behaviors of human locomotion. Journal of Physiology, doi: 10.1113/JP270228, accepted. [PDF]