Roll It Out CMU Robotics Research Finds Flattening Dough Requires Precise Adjustments
Stacey FederoffTuesday, November 1, 2022Print this page.
Anyone who's made a pizza knows that flattening the crust requires a series of adjustments before it's ready for toppings. The cook starts with an initial dough ball, then makes slight changes, rotating the rolling pin and putting pressure on the dough over and over until it's a flat circle.
While it can be a tricky technique for humans to master, researchers in Carnegie Mellon University's School of Computer Science wondered what it would take to teach a robot this task. Specifically, recent research from the Robotics Institute's (RI) Robots Perceiving and Doing (RPAD) lab used a planning algorithm called trajectory optimization to investigate how a robot should adjust its movements as it worked toward flattening dough into a circle. The team presented their work, "Learning Closed-Loop Dough Manipulation Using a Differentiable Reset Module," at the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2022) last week in Kyoto, Japan.
"The robot rolls out the dough in simulation, then gives feedback on how well the trajectory is doing rolling the dough," said Xingyu Lin, a member of the research team who earned his Ph.D. in robotics at CMU and is now a postdoctoral scholar at the Berkeley Artificial Intelligence Research (BAIR) Lab. "Then we updated the robot movements based on the result of this roll out. We performed this roll-out-and-update process iteratively until we found the trajectory that gave the desired outcome. It's very hard for trajectory optimization to find the final solution by itself, however, so that is the challenge."
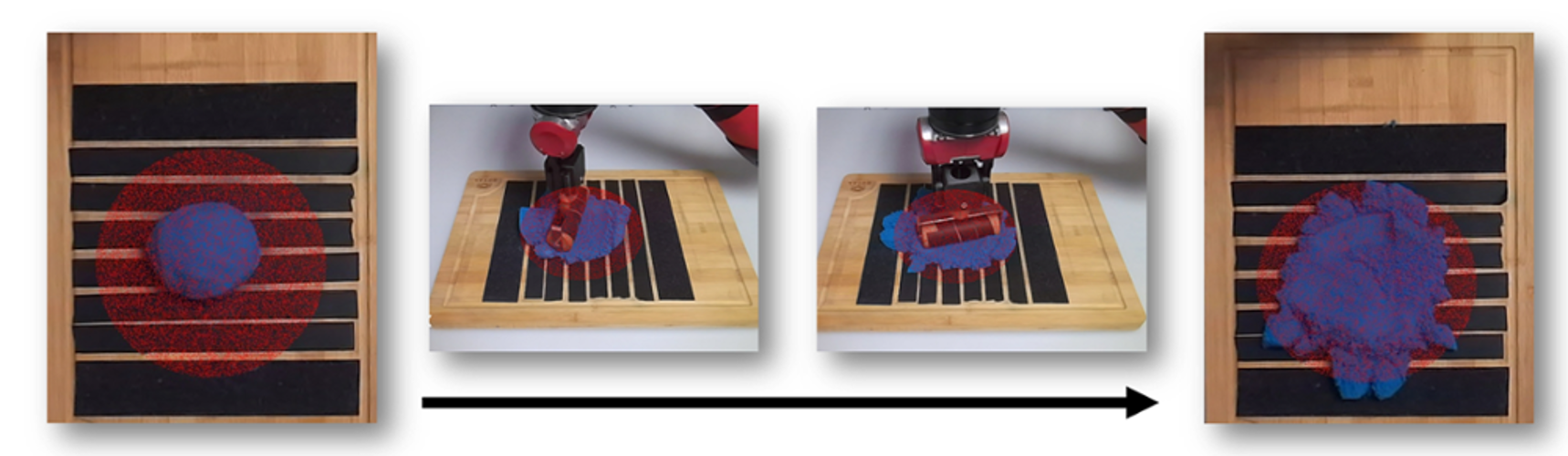
The robot can learn how to improve rolling the dough in one direction, but resetting and rolling again is more difficult. The team developed a reset module to teach the robot to account for the first roll when adjusting before making a second roll. This way, the dough comes out round.
"We brainstormed some approaches, and decided that if we reset the tool in between rolling, then made the reset compatible with the trajectory optimizer, we could jointly optimize multiple rolls," said Carl Qi, a master's student in the Machine Learning Department who worked on the research.
This work is one of three papers related to manipulating dough published by the RPAD lab. The other papers describe how a robot should analyze and approach the task of manipulating the dough, and how it should plan a sequence of actions using different tools to prepare the dough. The robot has to plan a hierarchy of choices for up to six stages, including using a knife to cut the dough, a spatula or scraper to move it, or a rolling pin to roll it.
The overall goal of the lab is to improve how robots handle deformable objects, such as cloth, that change when you touch them. This could enable a class of robots useful for household tasks such as cooking, folding laundry and cleaning.
Research often focuses on robots interacting with rigid objects. The challenge of working with deformable objects allows the RPAD lab to carve out new territory for innovation.
"Dough is very challenging, so anything you do with dough is really interesting to explore," said David Held, an assistant professor in the RI and head of the RPAD lab. "Other researchers are pushing us to see what more complex things we can do with dough, like braiding challah or making pastries."
Aaron Aupperlee | 412-268-9068 | aaupperlee@cmu.edu