16-711: Kinematics, Dynamics, & Control
By your TA, Matthew McNaughton
Comments on assignments
Sample code, lecture notes, and readings
- Use the Lagrange method
with the symbolic math features of Matlab to derive dynamics.
Here are a few variations on the theme. For your own
implementations, you can copy the last one.
-
ldemo.m - This uses a somewhat verbose
way of handling the derivatives.
- ldemo2.m - Clever use of the chain
rule to take the derivatives more compactly. Thanks to
Ben Stephens for pointing this out.
- lagrangian_segway.m -
Final generic implementation.
- udwadiademo.m - Use Uwadia
and Kalaba's method to implement the dynamics.
- Papers on Udwadia and
Kalaba's method of deriving equations of motion for
constrained systems:
Paper 1 (early),
Paper 2,
Paper 3 (handles with non-ideal
constraints)
- Uwadia and Kalaba's excellent book on analytical dynamics. Probably the best book ever written on the topic, and easy to understand.
- Wednesday Feb 14:
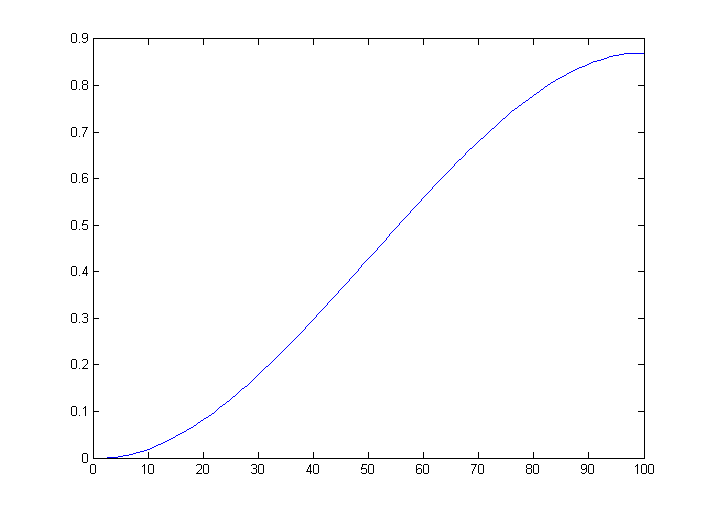
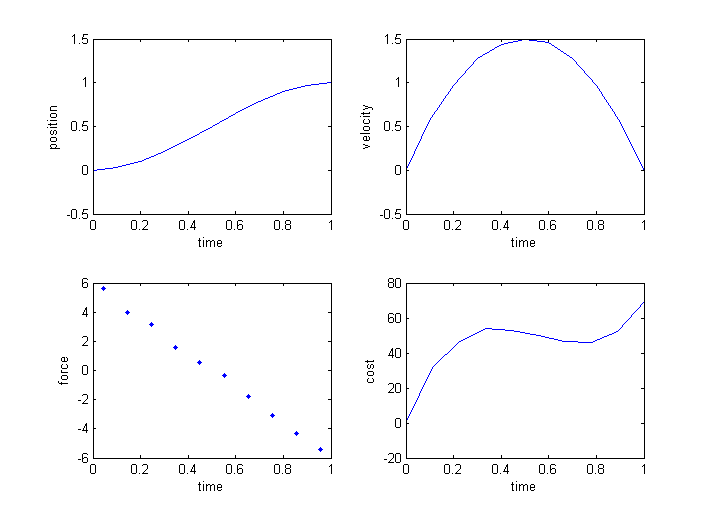
- Use Matlab's fmincon() for a rough demo
of nonlinear optimal control by direct transcription with a
point mass on a line
(linear constraint version).
- Solution for the point mass example,
and the results of running
the solution run without feedback through simulation.
- Another fmincon() demo, with
some nonlinear constraints. Solution, and result of simulation.
- Some examples of a full-cycle walk for a planar 5-link
biped derived with dircol: Example 1,
Example 2,
Example 3,
Example 4.
- ke1.mAnother quick demo of how to
use symbolic math in Matlab to avoid errors in deriving
equations.
- Monday April 2:
- symdyn.m and mycumsum.m, demonstration of using as little effort as possible to derive kinematics and dynamics of an arm.
Lab Instructions
Assignments
Assignment 7
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}