|
|
|
=C=> in shorthand notation) to move to the
next state in your state machine.
If you want to signal completion of a state node that you define, you
can call postStateCompletion() to post a completion event. This
method is inherited from the StateNode class. Writing
is equivalent to writingpostStateCompletion();
erouter->postEvent(EventBase::stateMachineEGID, (size_t)this, EventBase::statusETID);
=F=>. For
example, you might write a state node that watches a ball and signals
completion when the ball is within reach of the robot. If the camera
loses sight of the ball, the state node might post a failure
event.
To complement the failure transition, there is a success transition,
abbreviated =S=>. Sometimes you want to signal one of
two outcomes where neither is a "completion" or an abnormal condition;
they're just two possible alternatives, such as an answer to a
true/false question. You can use success and failure transitions for
this purpose.
=S=<T>(v)=>
as an abbreviation for SignalTrans, where T is the datatype of the signal
and v is the signal value to check for.
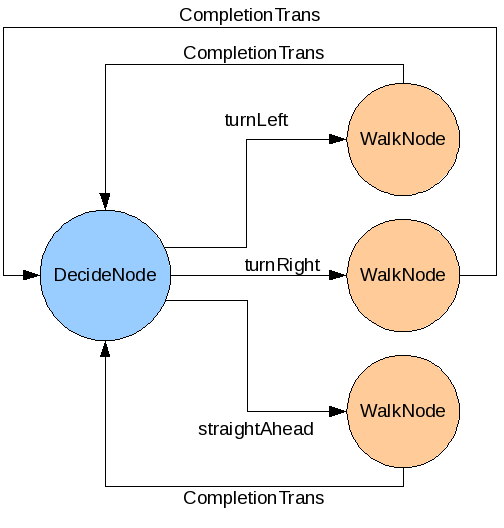
$nodeclass MyBehavior : VisualRoutinesStateNode {
enum proceedInstruction {
turnLeft,
turnRight,
straightAhead
};
$nodeclass DecideNode : VisualRoutinesStateNode : {
virtual void doStart() {
...
if ( x < -10 ) {
postStateSignal<proceedInstruction>(turnLeft);
return;
}
else ... ...
}
}
$setupmachine{
|
|
is equivalent to writingpostStateSignal<proceedInstruction>(turnLeft);
erouter->postEvent(DataEvent<proceedInstruction>(turnLeft, EventBase::stateMachineEGID, (size_t)this, EventBase::statusETID));
event is set to the event that triggered
the transition. (This is also true when the node's doEvent method is
invoked.) In the case of a SignalTrans<T> transition invoking
the doStart method, event is set to a DataEvent<T>.
User code can examine the DataEvent and retrieve the data it contains.
A method for doing this, called extractSignal<T>, is provided by
the StateNode class, allowing you to write:
virtual void doStart() {
const proceedInstruction x = extractSignal(event);
...
}
event is NULL or
is not of type DataEvent<T>.
|
|
|