 |
Alan Guisewite |
|
 |
|
|
|
|
|

Current Effort
Since late 2012, I have been providing some content and personnel contact info checking for the RI website - in early 2015 my position was consolidated with another position and I am now much more front-desk administrative.
Former Projects
From June 1998 through October 2012 I maintained and provided most of the content updating to the official Robotics Institute webpages while working on the projects below.
|
|
|
I consulted on the early phase of the ChargeCar project, in which we modified a Scion XB to run from batteries and supercapacitors.
|
|
|
|
Throughout most of 2006 I helped design various versions of the low-cost Explosive Ordnance Disposal Robot - Very Low Cost (EODR-VLC) , "Yoder" for short, a disposable first-reponse mobile robot. The project is no longer active - we planned to build an articulated version - but there was no funding. Yoder was one of the robots in an Engineering Your Future (EYF) workshop in mid-July 2006.
|
Starting in April 2005 and for approximately two years after that, I was on the Wide Area Prospecting Using Supervised Autonomous Robots project team. Specifically, I helped to design the Networked Communication System (NCS) for this project.
I have also worked on these projects (1999 - 2003):
- Early March 2003 found me again working for Cam Riviere, assembling the third generation of the Micron.
- During November and early December 2002, I again worked for Lee Weiss, designing and assembling a rackmount consolidation of the dispenser controller system.
- During April 2002 I worked for Cam Riviere's Medical Instrumentation Lab where I am assisted in the design and implementing of the second-generation Micron hand-held retinal surgery tool.
- From December 2001 through January 2002 I continued working for Lee Weiss, implementing and testing a dispenser controller.
- During November 2000 I again worked for Lee Weiss, modifying an Epson 900 ink-jet printer to deposit protein "ink" on microscope slide substrates.
- From late January to late May 1999, I worked for Ralph Hollis' Microdynamic Systems Lab where I assembled Minifactory baseunits and frames, which supply power, communications, and pneumatics to the overhead manipulators and courier robots.
- Prior to that, I designed and built an Opto-22 based controller / interface for the Shape Deposition Lab directed by Lee Weiss.
Earlier Projects
For many years before that, my primary research was (still with Mel Siegel) in 3D stereoscopy, comprising both the theoretical aspects of compressing two stereo image streams sufficiently to fit in a nominally single-channel bandwidth and the practicality of adding stereo video / images to commercial and industrial applications. See Software for 3D-TV and 3D-Stereoscopic Computer Workstations for a summary. Most of our recent projects have been in robotic inspection using both 3D stereoscopic displays and image enhancement techniques to provide a safer and more efficient (and thus a better ROI) device for aircraft inspectors. For an overview of aircraft inspection robotics see Remote and Automated Inspection: Status and Prospects.
My colleagues and I worked in these project areas:
When I first joined the Robotics Institute, I worked for Mel Siegel's Intelligent Sensor, Measurement, and Control Lab researching sensors and sensor-based instrumentation, primarily for process control enhancement.
|
|
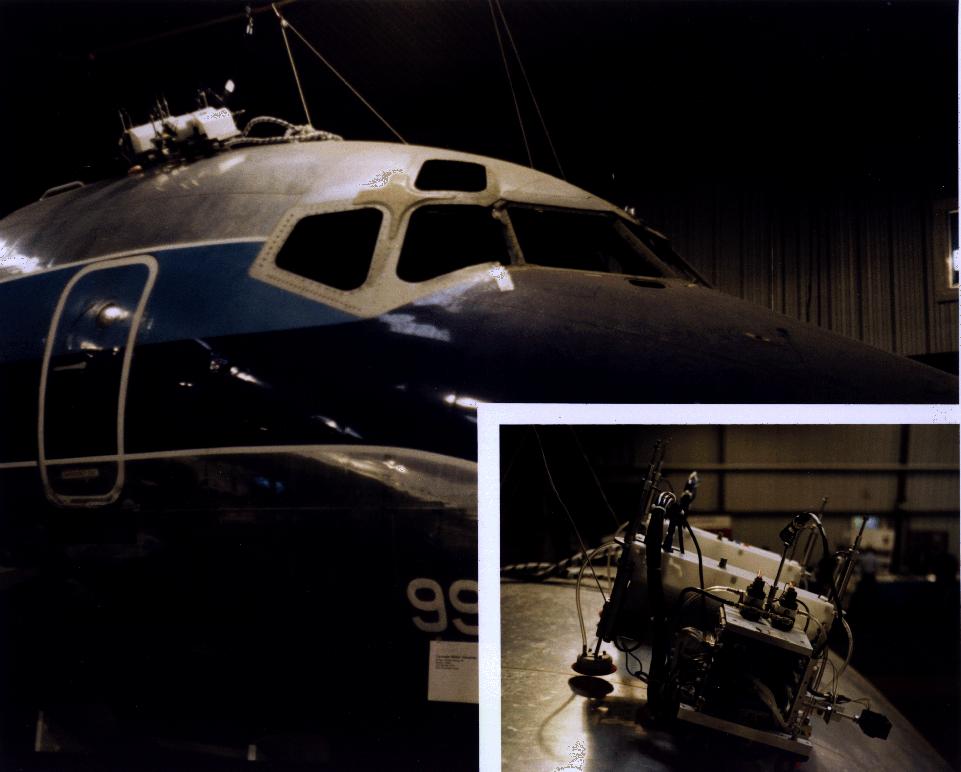
With funding from the Ben Franklin Technology Center of Western Pennsylvania we've constructed a prototype robot (CIMP, Crown Inspection Mobile Platform) to demonstrate the feasibility of delivering visual inspection stereoimagery from an aircraft to a ground-based workstation. CIMP (shown here on a 747 at Northwest's primary maintenance facility in St. Paul MN) and its stereoimagery are described in
|
Every moving vehicle makes some noise, either internal (engine, vibration, power train) or external (wind effects and interactions with surfaces). These noise signatures, for similar vehicles in similar circumstances, are diagnostic and can be used for vehicle identification and tracking. Vehicle Sound Pattern Recognition by Frequency Vector Principal Component Analysis describes our research.
Earlier Projects
One of the most important controllable aspects of aircraft visual inspection is the lighting. Inspectors typically use a flashlight and rotate it around the area of interest to help them decide if a crack is really a crack. We built a PC-controlled Test Inspection Platform (TIP) to demonstrate selectable lighting angles and incorporated that research into CIMP.
During 1994 we did a literature survey and concept design for the U. S. Coast Guard. The Coast Guard is responsible for ensuring safe transport and storage of any hazardous materials shipped via inland and coastal waterways. When accidents involving such materials occur, they must evaluate the situation. They wanted a teleoperated robot that would precede a Hazmat Team into enclosed areas and transmit (stereo)video imagery and some level of chemical analysis data from onboard sensors and samplers to minimize both the danger to and the in-suit time of the team.
|
|
The precursor to CIMP was the ANDI (Autonomous NonDestructive Inspector) prototype robot for eddy-current-based aircraft inspection. We provided the technical oversight; ANDI was fabricated at the Carnegie Mellon Research Institute. Supported financially by the FAA and in cooperation with US Airways, ANDI (shown here on an Eastern Airlines DC-9 at Sandia's AANC in Albuquerque NM) and its application is discussed in
|
|
|
We did theoretical research on robotics for contraband and explosives detection in the early '90s. These two papers:
along with the near-loss of Aloha Airlines Flight 243 on April 28, 1988 were the springboard to launch the ANDI Project. |
Most of our projects prior to ANDI were sensor-based; consisting of the design, modification, or implementation of sensors for measurements without a robotic presence.
In 1992 for the CSX Corporation, we prototyped a sensor for mapping the magnetic structure of railway car undersides to identify car types and (possibly) individual car identities.
| From '91 through '92 the
ABB Power T&D Company Inc. funded an investigation into the automation of fault analysis and resolution in protective relaying using expert systems. The result of that study is described in
|
|
|
|
During 1990 and 1991 we worked for the Inland Fisher Guide Division of General Motors, now the Signal Lighting Operations Engineering Center of the Guide Corporation, on a project quantifying the light-emission pattern from GM headlamps to improve the design-to-manufacture time of their reflectors. The data also led to these recent papers in SPIE's Optical Engineering
|
|
The Cabot Corporation sponsored our 1980's research in gas sensors - the sensors were fabricated by our colleagues at the ORNL. The project resulted in four papers:
|
|
|
|
The mid-80's also found us with a contract from the
Fiberglass Products division of PPG Industries to measure (online) the diameter (and hence, the mass flow rate) of fiberglass strands drawn from a furnace as part of a closed-loop temperature controller. This research resulted in a CMU Technical Report
an SPIE paper
and U. S. Patent 5 015 867, 1991.
|
We had the country's first computer-controlled nanobrewery in 1982! This long-running project, sponsored by Air Products and Chemicals, Mine Safety Appliances, American Cyanamid, and Travenol Laboratories (now part of Baxter International), investigated distributed process control techniques, analytical instrumentation, and sensor components as they applied to fermentation. Unfortunately, (for legal and safety reasons) the beer was deliberately made to be undrinkable. The process was initially controlled by an ISAAC / Apple-II Automated Data Acquisition and Control System, later by a Keithley DAS, and finally (with the advent of RS-232 control modules from the DGH Corporation) was a truly "distributed" system. The testbed was decommissioned in 1995 to make room for TIP and CIMP.
There have been numerous other projects and spin-off researches done concurrently with the above; most of our earlier publications can be found here in both PostScript and PDF formats.
When I worked for the Biomedical Engineering Program (in the mid-70s), I built some of the early Displacement Cardiograph. prototypes and prototypes of LED-based blood oximetry devices.
Personal
I'm only distantly related toCathy!
I am (or have been) a member of the following organizations (among others)
My hobbies include:
After my dad retired, he worked (until 2005) part time at the Mission Inn Golf & Tennis Resort.
My dad piloted (and co-piloted) C-47s during WWII - here's a page with pictures and more info.
maintained by: Alan Guisewite
Last Update 20 May 2017
Thanks to: Jim's
Cool Icons for the "MORE" pushbuttons!
| NOTE: This material is presented to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein are retained by authors or by other copyright holders. All persons copying this information are expected to adhere to the terms and constraints invoked by each author's copyright. In most cases, these works may not be reposted without the explicit permission of the copyright holder. |









{kind=link}