|
 |

 |

 |
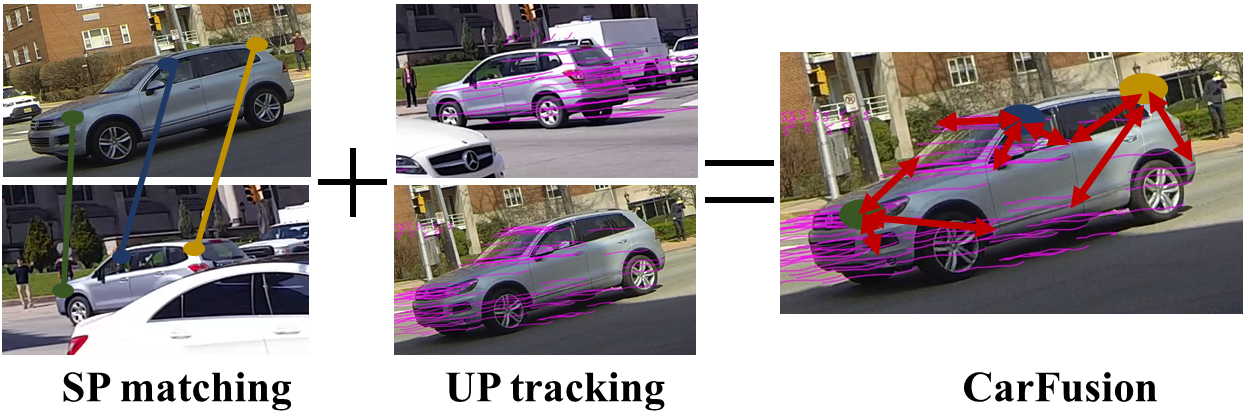
CarFusion
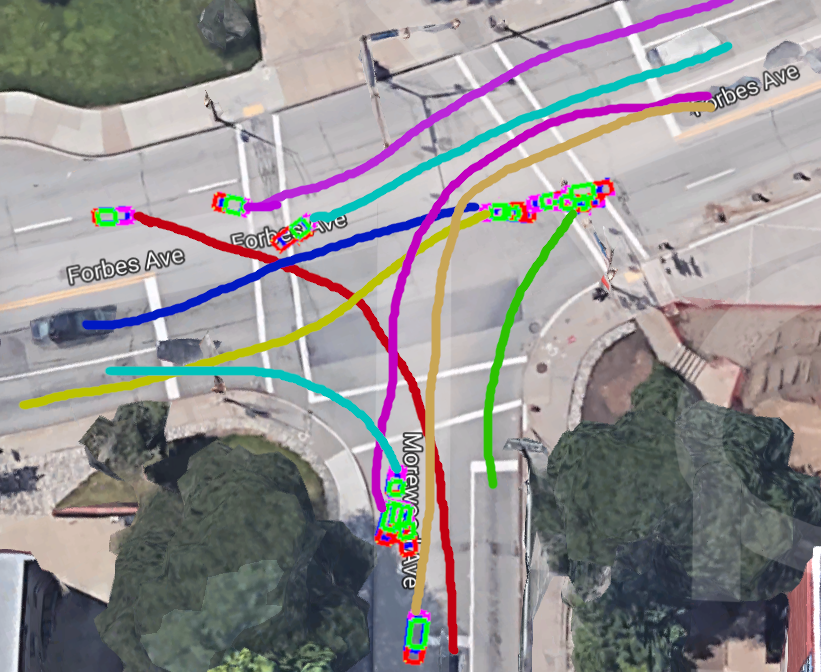
Fast and accurate 3D reconstruction of multiple dynamic rigid objects (eg. vehicles) observed from wide-baseline, uncalibrated and unsynchronized cameras is challenging. On one hand, feature tracking works well within each view but is hard to correspond across multiple cameras with limited overlap in fields of view or due to occlusions. On the other hand, advances in deep learning have resulted in strong detectors that work across different viewpoints but are still not precise enough for triangulation based reconstruction. In this work, we develop a framework to fuse both the single-view feature tracks and multiview detected part locations to significantly improve the detection, localization and reconstruction of moving vehicles, even in the presence of strong occlusions. We demonstrate our framework at a busy traffic intersection by reconstructing over 40 vehicles passing within a 3-minute window. We evaluate the different components within our framework and compare to alternate approaches such as reconstruction using tracking-by-detection.