Berkeley Quadrotor Flying At CMU
Today the quadrotor team (both from Software Engineering at ISR and ECE) lead by Bruce Krogh flew the Berkeley quadrotor at lab in Baker Hall. Our pilot was Tianyu Gu (who previously flew the quadrotor in Berkeley) showed us the quadrotor hovering around the lab.

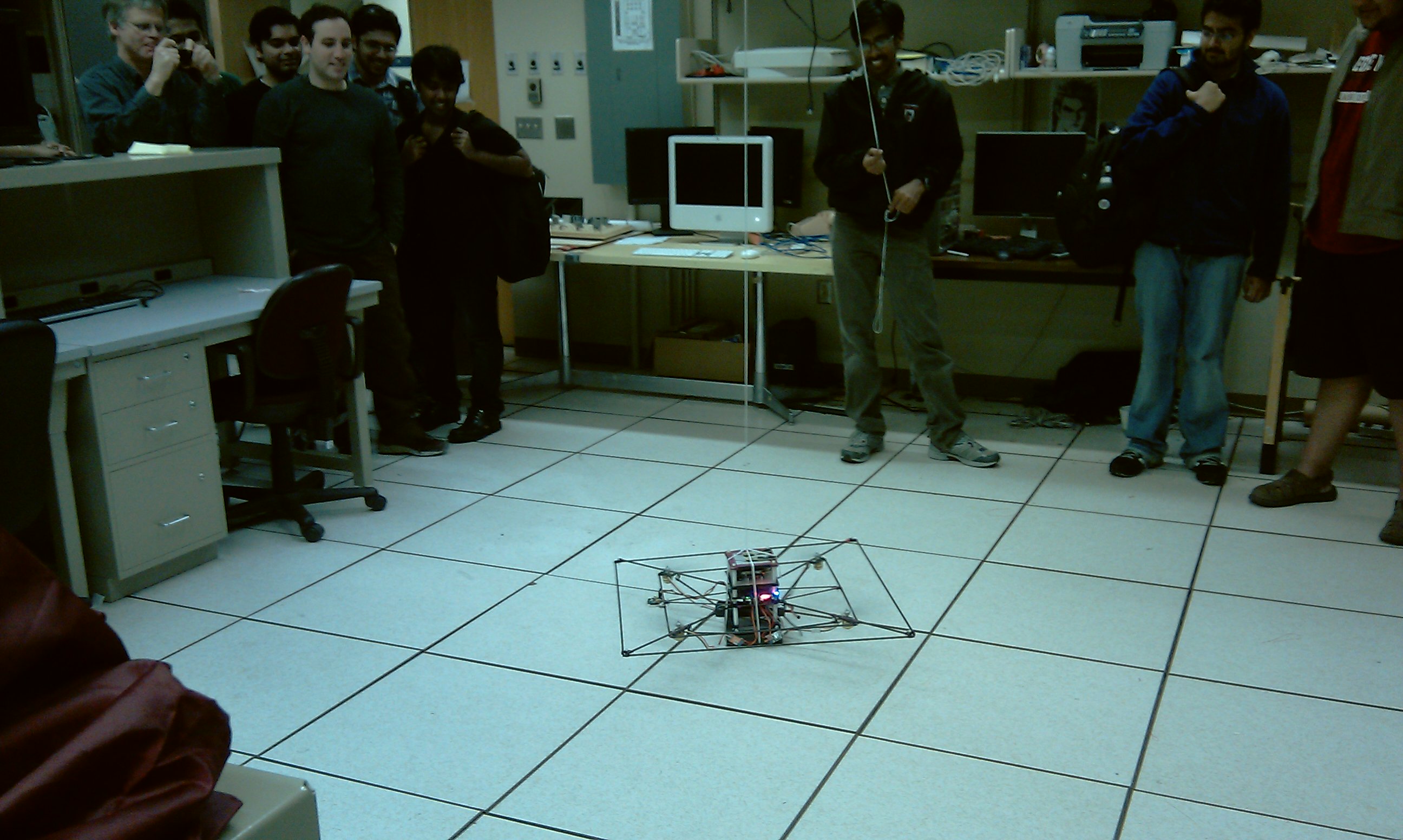
Manually controlling the quadrotor was quite a challange. The quadrotor is controlled through a joystick which seems to be pretty much ... sensitive. Fortunately, we (me, Tianyu and Bhadri) had previously arranged for a "security" device which is basically a rope tied on one of the lab's ceiling lamps (which we were careful enough to check that could handle the weight).

The rope is not (as it may seem from the picture) suspending the quadrotor. Bhadri keeps the rope loose enough so that it doesn't afect flying but tight enough so that it doesn't get tangled in the propellers. It is essentially preventing the quadrotor from hitting something (or someone) or falling on the floor. Quadrotors are expensive, the lab is expensive and, well, people are expensive too :)
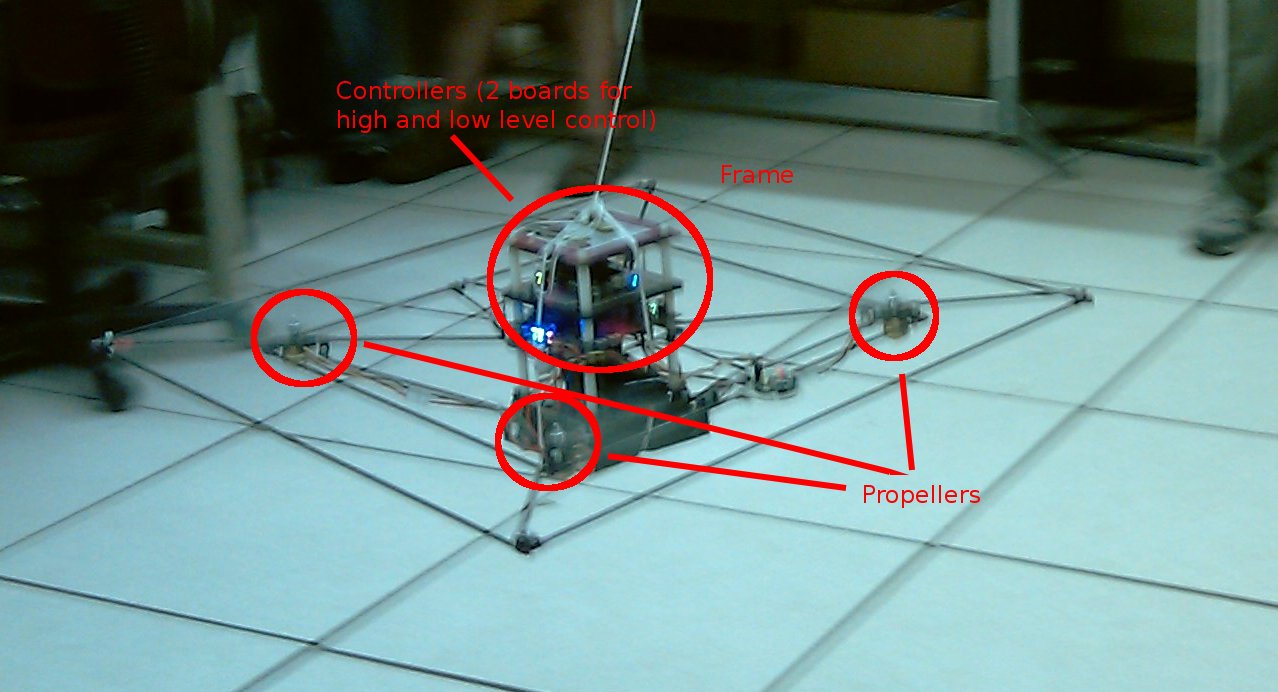
The quadrotor has four propellers (hence its name) which makes its dynamics much simpler than a standard helicopter (according to the control guys). It has a frame which gives some consistency to the structure. The propellers are mounted in the frame. In the center lays a "core" with two controllers, an ATOM board and a robostix board).
CMU imported the quadrotor from Berkeley and is now working on several projects which range from integrating sensors to rearchitecturing the code of the low level control board of the quadrotor (task being performed by the MSIT-ESE group). This project is part of a larger effort at CMU for Cyber-Physical Systems.
A picture of the team preparing for quadrotor flight test number one!
Tianyu getting ready yo fly the quadrotor with the joystick.

We had other pilots that flew the quadrotor too.

APR23