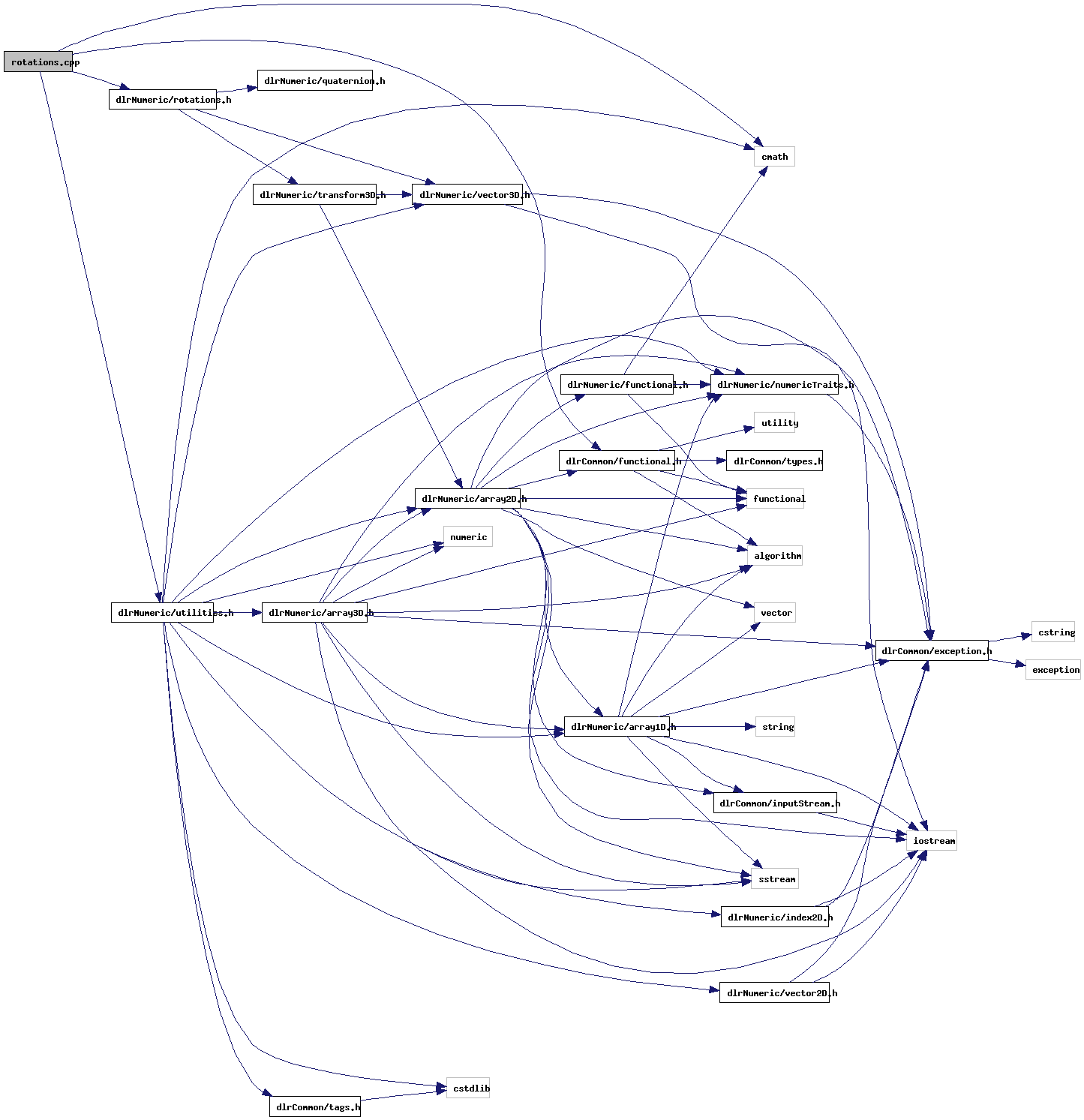
#include <cmath>
#include <dlrCommon/functional.h>
#include <dlrNumeric/rotations.h>
#include <dlrNumeric/utilities.h>
Include dependency graph for rotations.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | dlr |
| namespace | dlr::numeric |
Functions | |
| Quaternion | dlr::numeric::angleAxisToQuaternion (double angle, const Vector3D &axis, bool isNormalized=false) |
| This function converts a rotation from angle-axis representation to unit quaternion representation. | |
| Vector3D | dlr::numeric::angleAxisToRollPitchYaw (double angle, const Vector3D &axis, bool isNormalized=false) |
| This function converts a rotation from angle-axis representation to roll-pitch-yaw representation. | |
| Transform3D | dlr::numeric::angleAxisToTransform3D (double angle, const Vector3D &axis, bool isNormalized=false) |
| This function converts a rotation from angle-axis representation to Transform3D representation. | |
| std::pair< double, Vector3D > | dlr::numeric::quaternionToAngleAxis (const Quaternion &quaternion) |
| This function converts a rotation from Quaternion representation to Angle-Axis representation. | |
| Vector3D | dlr::numeric::quaternionToRollPitchYaw (const Quaternion &quaternion) |
| This function converts a rotation from Quaternion representation to Roll-Pitch-Yaw representation. | |
| Transform3D | dlr::numeric::quaternionToTransform3D (const Quaternion &quaternion) |
| This function converts a rotation from Quaternion representation to Transform3D representation. | |
| std::pair< double, Vector3D > | dlr::numeric::rollPitchYawToAngleAxis (const Vector3D &rollPitchYaw) |
| This function converts a rotation from Roll-Pitch-Yaw representation to Angle-Axis representation. | |
| Quaternion | dlr::numeric::rollPitchYawToQuaternion (const Vector3D &rollPitchYaw) |
| This function converts a rotation from Roll-Pitch-Yaw representation to Quaternion representation. | |
| Transform3D | dlr::numeric::rollPitchYawToTransform3D (const Vector3D &rollPitchYaw) |
| This function converts a rotation from Roll-Pitch-Yaw representation to Transform3D representation. | |
| std::pair< double, Vector3D > | dlr::numeric::transform3DToAngleAxis (const Transform3D &transform3D) |
| This function converts a rotation from Transform3D representation to Angle-Axis representation. | |
| Quaternion | dlr::numeric::transform3DToQuaternion (const Transform3D &transform3D) |
| This function converts a rotation from Transform3D representation to Quaternion representation. | |
| Vector3D | dlr::numeric::transform3DToRollPitchYaw (const Transform3D &transform3D) |
| This function converts a rotation from Transform3D representation to Roll-Pitch-Yaw representation. | |
Copyright (C) 1996-2007 David LaRose, dlr@cs.cmu.edu See accompanying file, LICENSE.TXT, for details.
Definition in file rotations.cpp.
 1.5.2
1.5.2