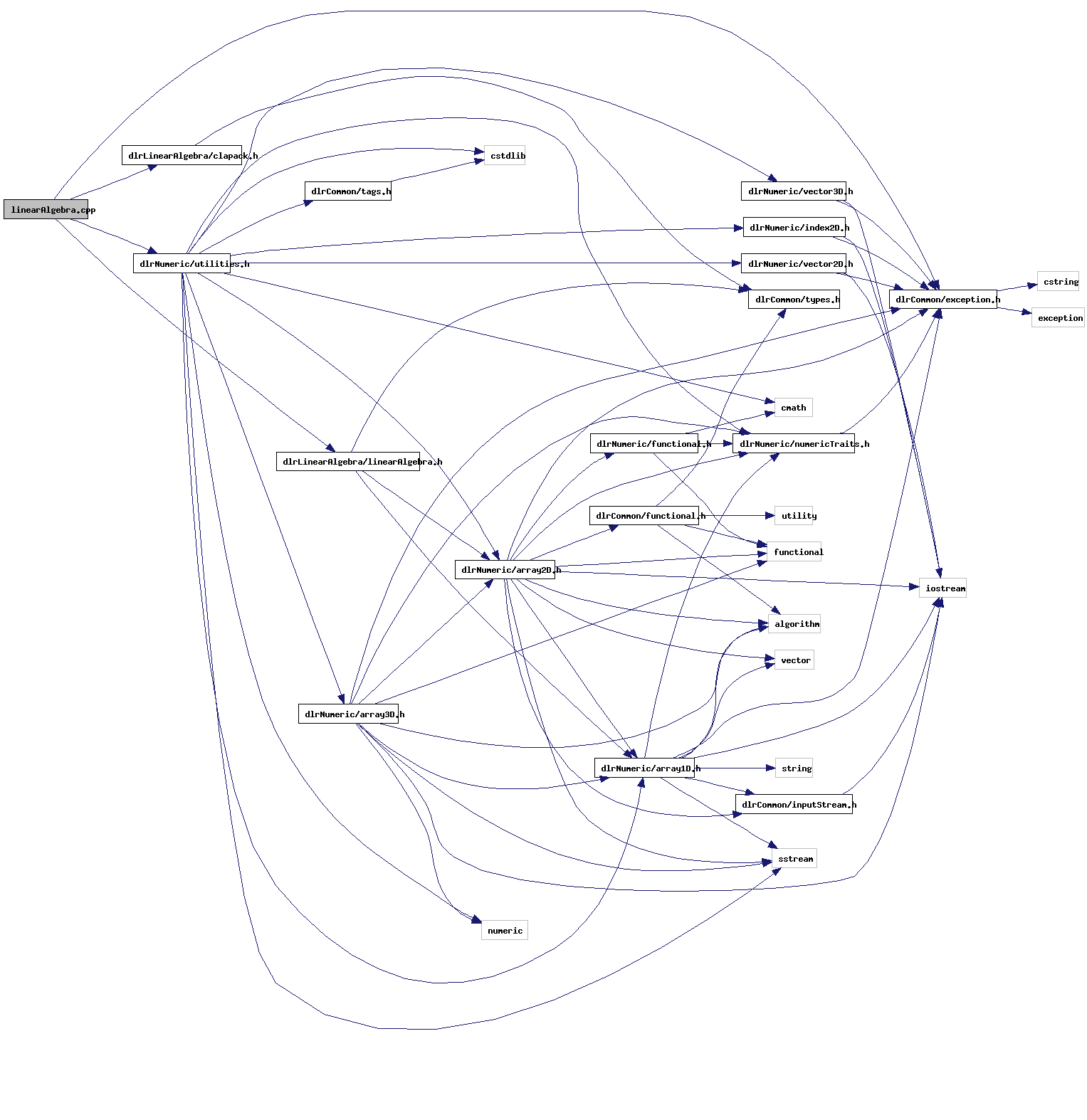
#include <dlrCommon/exception.h>
#include <dlrLinearAlgebra/linearAlgebra.h>
#include <dlrLinearAlgebra/clapack.h>
#include <dlrNumeric/utilities.h>
Include dependency graph for linearAlgebra.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | dlr |
| namespace | dlr::linearAlgebra |
Functions | |
| Float64 | dlr::linearAlgebra::determinant (const Array2D< Float64 > &A) |
| This function computes the determinant of a square Array2D<Float64> instance. | |
| Array1D< Float64 > | dlr::linearAlgebra::eigenvaluesSymmetric (const Array2D< Float64 > &inputArray) |
| This function computes the eigenvalues of a symmetric real matrix. | |
| void | dlr::linearAlgebra::eigenvectorsSymmetric (const Array2D< Float64 > &inputArray, Array1D< Float64 > &eigenvalues, Array2D< Float64 > &eigenvectors) |
| This function computes the eigenvalues and eigenvectors of a symmetric real matrix. | |
| Array2D< Float64 > | dlr::linearAlgebra::inverse (const Array2D< Float64 > &A) |
| This function accepts a square Array2D<Float64> instance and returns an Array2D<Float64> instance such that the matrix product of the two is equal to the identity matrix. | |
| std::pair< Float64, Float64 > | dlr::linearAlgebra::linearFit (const Array1D< Float64 > &array0, const Array1D< Float64 > &array1) |
| This function computes the best linear fit between the two input arrays. | |
| Array1D< Float64 > | dlr::linearAlgebra::linearLeastSquares (const Array2D< Float64 > &A, const Array1D< Float64 > &b) |
| This function solves the system of equations A*x = b, where A and b are known Array2D<Float64> instances. | |
| void | dlr::linearAlgebra::linearSolveInPlace (Array2D< Float64 > &A, Array1D< Float64 > &b) |
| This function solves the system of equations A*x = b, where A is a known matrix, and b is a known vector. | |
| void | dlr::linearAlgebra::linearSolveInPlace (Array2D< Float64 > &A, Array2D< Float64 > &b) |
| This function is identical to linearSolveInPlace(Array2D<Float64>, Array1D<Float64>&), except that b (and therefore x) is not constrained to be a vector. | |
| Array1D< Float64 > | dlr::linearAlgebra::linearSolveTridiagonal (const Array1D< Float64 > &subDiagonal, const Array1D< Float64 > ¢erDiagonal, const Array1D< Float64 > &superDiagonal, const Array1D< Float64 > &bVector) |
| This function solves the system of equations A*x = b, where A is a known tridiagonal matrix and b is a known vector. | |
| Array2D< Float64 > | dlr::linearAlgebra::pseudoinverse (const Array2D< Float64 > &A) |
| This function accepts an Array2D<Float64> instance having at least as many rows as columns, and returns the Moore-Penrose pseudoinverse. | |
| void | dlr::linearAlgebra::singularValueDecomposition (const Array2D< Float64 > &inputArray, Array2D< Float64 > &uArray, Array1D< Float64 > &sigmaArray, Array2D< Float64 > &vTransposeArray) |
| This function computes the singular value decomposition of a matrix. | |
| void | dlr::linearAlgebra::singularValueDecompositionSimple (const Array2D< Float64 > &inputArray, Array2D< Float64 > &uArray, Array1D< Float64 > &sigmaArray, Array2D< Float64 > &vTransposeArray) |
| Array1D< Float64 > | dlr::linearAlgebra::singularValues (const Array2D< Float64 > &inputArray) |
| This function computes the singular values a matrix without computing the associated U and V matrices. | |
Many of these depend on the LAPACK and BLAS libraries.
Copyright (C) 2001-2004 David LaRose, dlr@cs.cmu.edu See accompanying file, LICENSE.TXT, for details.
Definition in file linearAlgebra.cpp.
 1.5.2
1.5.2