
|
| Complete | Training | Validation | Testing | |
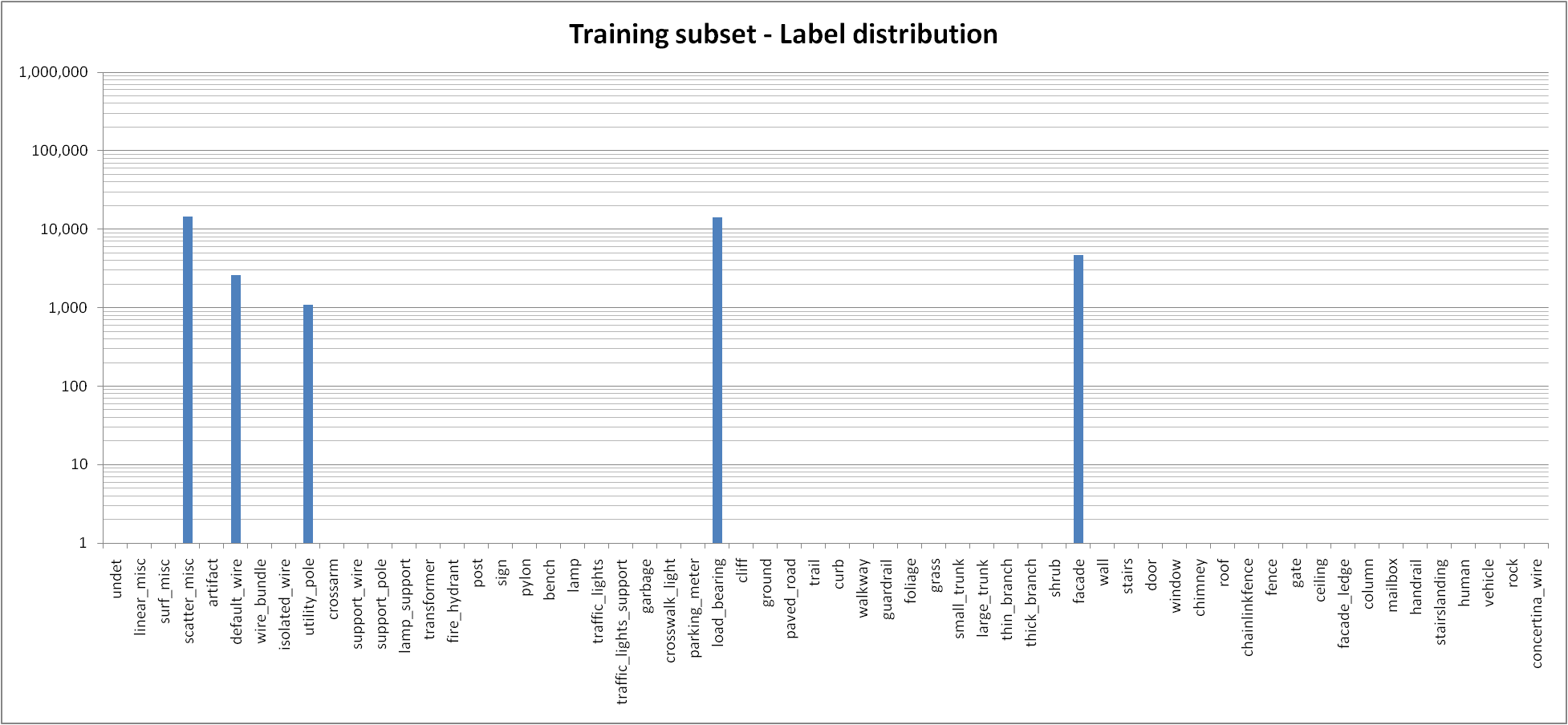
| statistics | 17 files, 1.6 millions 3-D pts, 44 labels | 1 file, 36932 3-D pts, 5 labels | 1 file, 91579 3-D pts, 5 labels | 15 files, 1.3 millions 3-D pts, 5 labels |
| Label distribution | [PNG] | [PNG] | [PNG] | [PNG] |
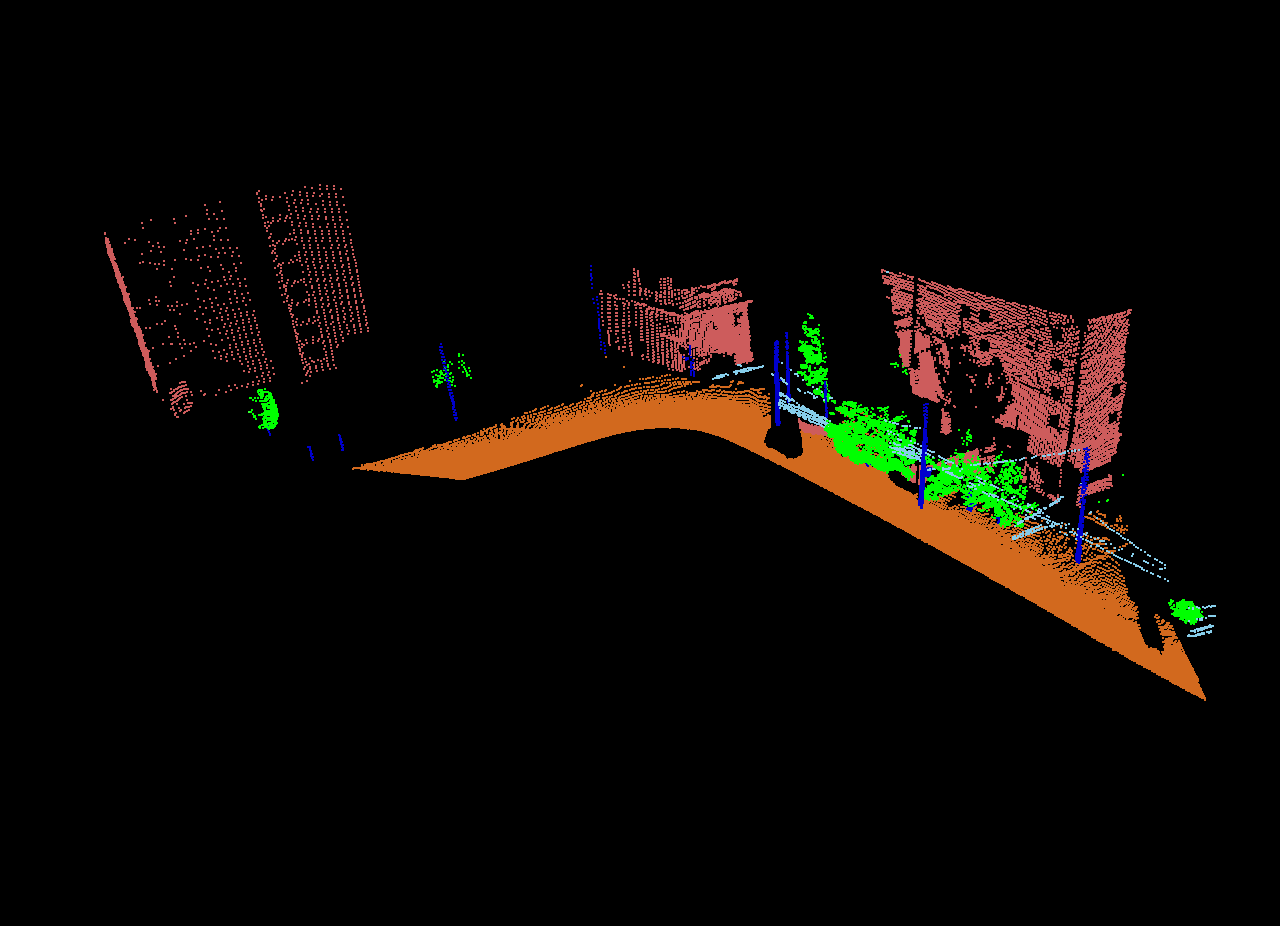
| Snapshots | [PNG] | [PNG] | ||
| Data set | [ZIP, 16 MB] | [ZIP, 2 MB] | [ZIP, 1 MB] | [ZIP, 14 MB] |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}