ProofAwarE CPS: Proof-Aware Engineering of Cyber-Physical Systems
Cyber-physical systems (CPS) are operated in many safety-critical areas where
lives are at stake, such as in road traffic and robotics. CPS are almost
impossible to get right without proper analysis of their behavior, which emerges
from combined discrete dynamics (the cyber part, e.g., setting the acceleration of
a car) and the entailed continuous dynamics (the physical part, e.g., motion of a
car). Thus, formal verification techniques to analyze CPS are of paramount
importance to provide correctness guarantees for all of the infinitely many
possible states of a CPS - not just for some, as in testing or simulation.
Formal verification rests on models of a CPS, which capture these infinitely
many possible states. Current methods make a trade-off between full automation and
modeling expressiveness: Reachability analysis methods focus on full automation
and are therefore restricted to less expressive classes of CPS. Theorem proving
methods, in contrast, rely on human guidance to make progress despite
undecidability so that more realistic models can be verified. To make human
guidance possible, however, the inherent complexities of CPS practically mandate
incremental development, which requires full re-verification after every change
with current theorem proving methods. At the same time, we want the correctness
properties that are verified formally for a model also to hold for an actual
implementation. For this, we have to resolve a gap between modeling concepts
that are beneficial for verification (e.g., non-deterministic control) and those
that are appropriate for implementation (e.g., deterministic control) in a way
that preserves correctness.
The vision of this project is to reduce verification effort despite incremental
CPS engineering, and at the same time ensure implementation correctness despite
conceptual gaps to modeling.
To work towards achieving this vision, we will base on our prior experience with
CPS to make the concepts, methods, techniques, and tools for incremental
engineering of CPS proof-aware.
- Proof-aware Refinement: Develop provably correct refinement that change
the structure models (e.g., share duplicated control decision) the behavior
models (e.g., introduce sensor uncertainty) and automatically derive proof
to retain correctness.
- Proof-aware Composition: Develop provably correct composition to connect
verified CPS components (e.g., asynchronously communicate), automatically
derive proof to establish system correctness and adapt components to their
new environment.
- Proof-aware Implementation: Develop provably correct transformation
(e.g., non-deterministic sensor input into sensor access through a driver)
that turn a CPS model into code automatically.
Funding: FWF P28187-N31
 Sphinx: Collaborative Verification-Driven Engineering of Cyber-Physical Systems
Sphinx: Collaborative Verification-Driven Engineering of Cyber-Physical Systems BeAware: Situation Awareness in Road Traffic Management
BeAware: Situation Awareness in Road Traffic Management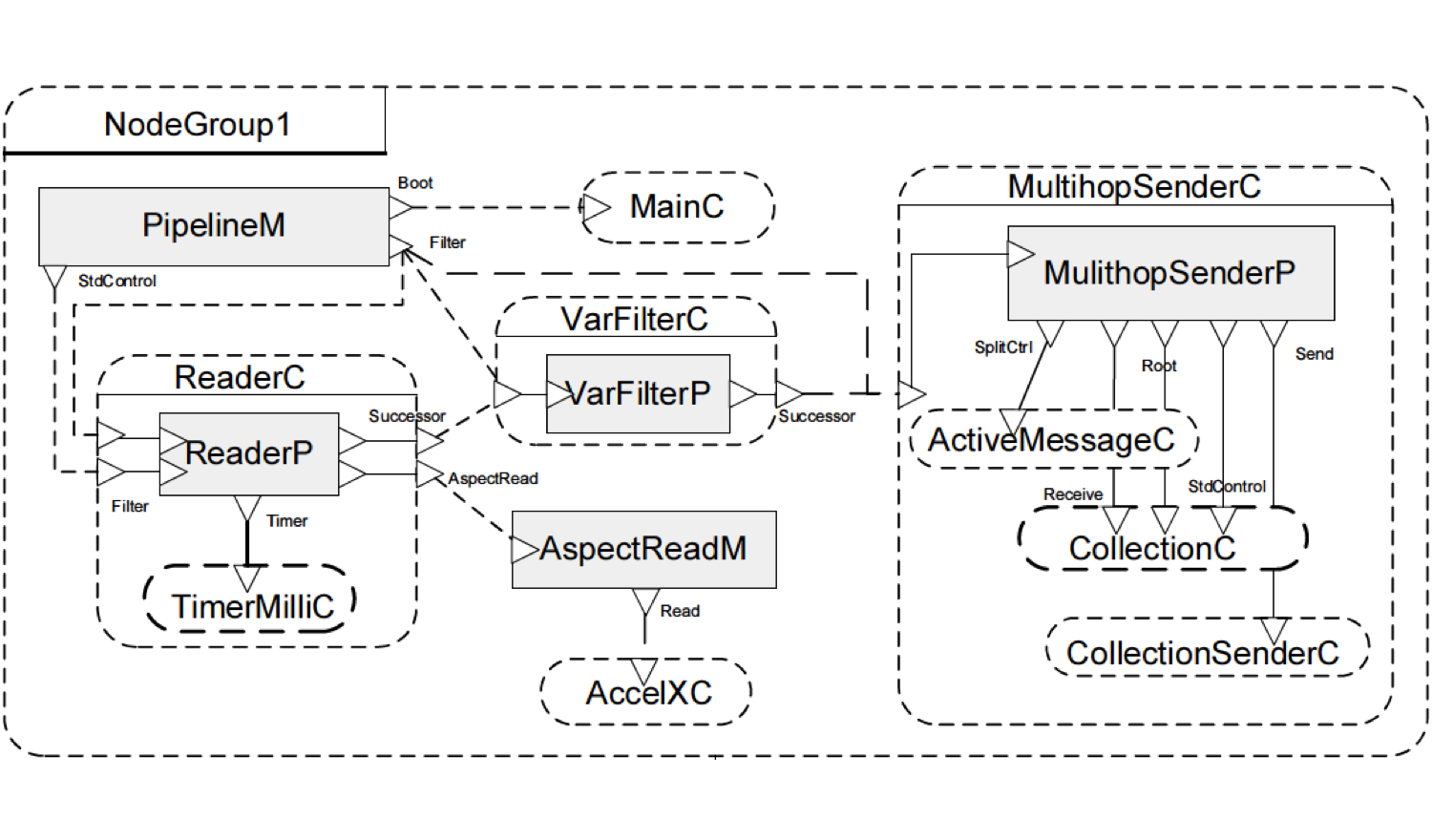 Sensor Network Modeling
Sensor Network Modeling Online social network content integration
Online social network content integration