
Overview
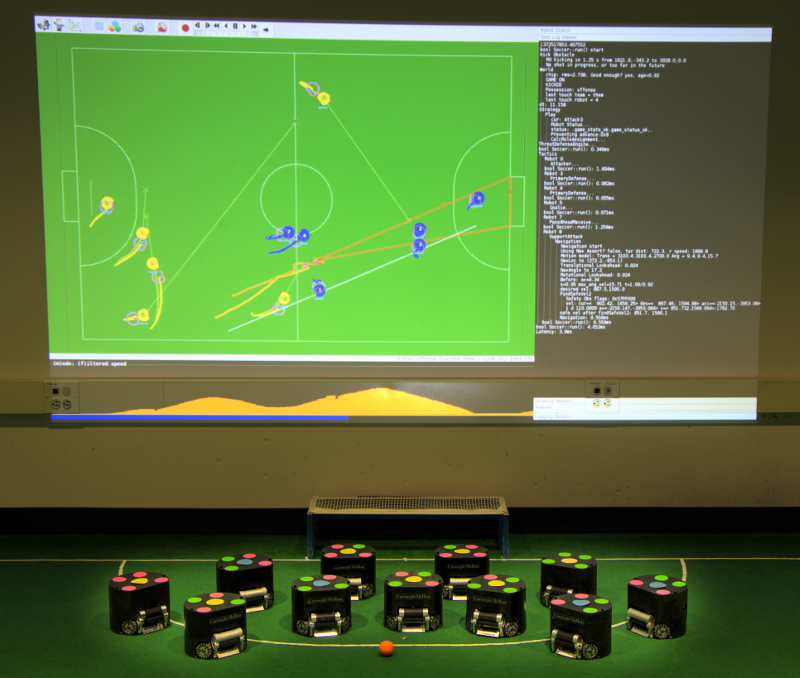
The RoboCup Small-Size robot soccer League (SSL) is a research
domain to study multi-robot planning and execution under the
uncertainty of real-time perception and motion in an adversarial
environment. The RoboCup SSL is set as a soccer game between two teams
of six robots each, playing with an orange golf ball in a field of
predefined size with line markings. The top of each robot is a unique
colored-coded pattern to enable a set of overhead cameras, running the
shared SSL-Vision algorithm, to determine the position and orientation
of each robot. The perceived pose of the robots and the position of
the ball are passed to each team's offboard computers that then plan
for the team strategy and communicate by radio the computed position
of each robot. The complete cycle of perception, planning, and
actuation is hence fully autonomous. The rules of the game are
dictated by a referee, as of now a human, but research pursues on
automated refereeing. The centralized perception, offboard
computation, and the team-built robots with pre-specified size and
shape constraints, set the RoboCup SSL apart from the other RoboCup
soccer leagues. The research focus is on teamwork, including
positioning and ball passing, rather than on single robot issues, such
as localization, as present and challenging in the other leagues. 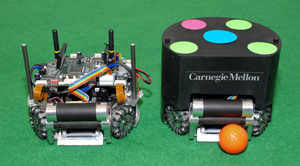 The RoboCup SSL games are very fast and dynamic, as can be seen in videos
of our games (see Multi-Media).
The RoboCup SSL games are very fast and dynamic, as can be seen in videos
of our games (see Multi-Media).
Our Carnegie Mellon University RoboCup SSL teams are led by Professor Manuela Veloso, and have participated in the competition since the first RoboCup in 1997. Our teams, with different groups of students along the years, have won the competition five times (1997, 1998, 2006, 2007, 2015), and achieved second place four times (2008, 2010, 2013, 2014), making us the current leader of the RoboCup Robot Soccer Small Size League Hall of Fame.
RoboCup 2015 SSL Champions (Video)
| Games won | 6 | Goals scored | 48 |
| Games tied/lost | 0 | Goals received | 0 |
| Shot attempts | 148 | Pass attempts | 245 |
| Goals | 48 | Completed | 194 |
| Missed | 20 | Missed | 28 |
| Blocked | 80 | Blocked | 83 |
| Goalie blocked | 28 | ||
| Other blocked | 52 | ||
| Shot conversion rate | 32% | ||
| Pass completion rate | 79% |







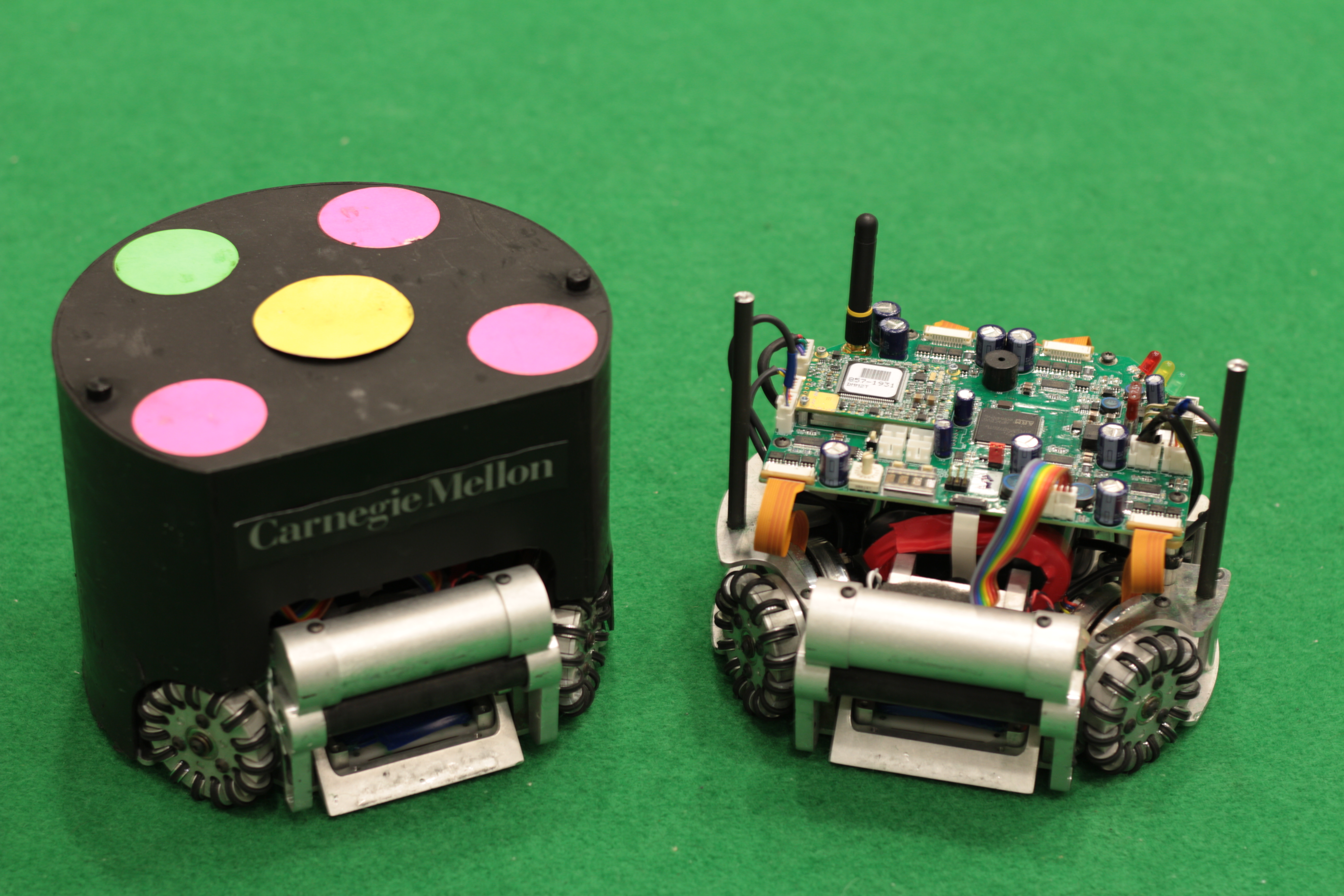 Our team consists of twelve homogeneous robots, with six being used
in a game at any point in time. Each robot is omnidirectional,
with four custom-built wheels driven by 30 watt brushless motors. Each motor has a
reflective quadrature encoder for accurate wheel travel and
speed estimation. The kicker is a large diameter custom wound solenoid attached
directly to a kicking plate, which offers improved durability compared to designs
using a standard D-frame solenoid. The kicker is capable of propelling the ball
at speeds up to 15m/s, and is fully variable so that controlled passes can also be
carried out. The CMDragons robot also has a chip-kicking device.
It is a custom-made flat solenoid located under
the main kicker, which strikes an angled wedge visible at the front bottom of
the robot. The wedge is hinged and travels a short distance at a 45% angle from
the ground plane, driving the ball at a similar angle. It is capable of propelling
the ball up to 4.5m before it hits the ground. Both kickers are driven by a bank
of three capacitors charged to 200V. The capacitors are located directly above
the kicker and below the electronics, leading to our unusual mechanical design
which lacks a single connected "midplate". By using a slightly thicker baseplate,
and several partial midplates with multiple standoffs for support, we were still
able to design a highly robust robot.
Our team consists of twelve homogeneous robots, with six being used
in a game at any point in time. Each robot is omnidirectional,
with four custom-built wheels driven by 30 watt brushless motors. Each motor has a
reflective quadrature encoder for accurate wheel travel and
speed estimation. The kicker is a large diameter custom wound solenoid attached
directly to a kicking plate, which offers improved durability compared to designs
using a standard D-frame solenoid. The kicker is capable of propelling the ball
at speeds up to 15m/s, and is fully variable so that controlled passes can also be
carried out. The CMDragons robot also has a chip-kicking device.
It is a custom-made flat solenoid located under
the main kicker, which strikes an angled wedge visible at the front bottom of
the robot. The wedge is hinged and travels a short distance at a 45% angle from
the ground plane, driving the ball at a similar angle. It is capable of propelling
the ball up to 4.5m before it hits the ground. Both kickers are driven by a bank
of three capacitors charged to 200V. The capacitors are located directly above
the kicker and below the electronics, leading to our unusual mechanical design
which lacks a single connected "midplate". By using a slightly thicker baseplate,
and several partial midplates with multiple standoffs for support, we were still
able to design a highly robust robot.
 Ball catching and handling is performed by a motorized rubber-coated dribbling
bar which is mounted on an hinged damper for improved pass reception.
The dribbling bar is driven by a brushless motor so that it can achieve a high
speed without sacrificing torque. The hinged damper can also be retracted using
a small servo. This is used during certain kicking maneuvers, so that the
dribbling bar does not interfere with speed or accuracy.
Our robot is designed for full rules compliance at all times. The robot fits
within the maximum dimensions specified in the official rules, with a maximum
diameter of 178mm and a height of 143mm. The dribbler holds up to 19% of the
ball when receiving a pass, and somewhat less when the ball is at rest or during
normal dribbling. The chip kicking device has a very short travel distance, and at
no point in its travel can it overlap more than 20% of the ball due to the location
of the dribbling bar. While technically able to perform kicks of up to 15m/s, the
main kicker has been hard-coded to never exceed kick-speeds of 8m/s for full
rule compliance.
Ball catching and handling is performed by a motorized rubber-coated dribbling
bar which is mounted on an hinged damper for improved pass reception.
The dribbling bar is driven by a brushless motor so that it can achieve a high
speed without sacrificing torque. The hinged damper can also be retracted using
a small servo. This is used during certain kicking maneuvers, so that the
dribbling bar does not interfere with speed or accuracy.
Our robot is designed for full rules compliance at all times. The robot fits
within the maximum dimensions specified in the official rules, with a maximum
diameter of 178mm and a height of 143mm. The dribbler holds up to 19% of the
ball when receiving a pass, and somewhat less when the ball is at rest or during
normal dribbling. The chip kicking device has a very short travel distance, and at
no point in its travel can it overlap more than 20% of the ball due to the location
of the dribbling bar. While technically able to perform kicks of up to 15m/s, the
main kicker has been hard-coded to never exceed kick-speeds of 8m/s for full
rule compliance.





