 The Personal Rover Project: Rover1
The Personal Rover Project: Rover1
[ Overview | Robot | Interface | Downloads | Q & A | People ]
The Personal Rover Project: Rover1
Rover1 Details & Gallery
In this picture, Rover1 is tracking the fire hydrant and heading toward it.
 |
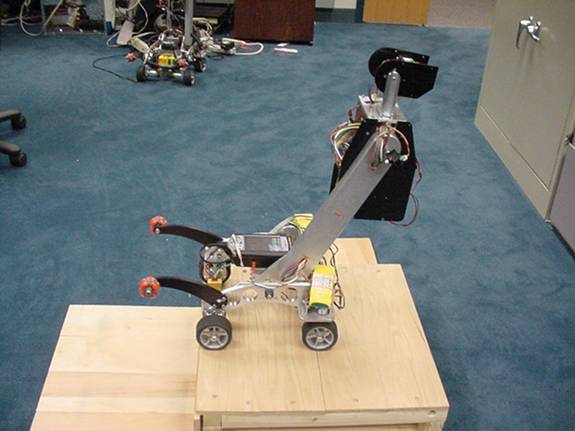
These pictures show the key steps in the rover climbing the stair. In the first picture, you can see the rover just as its front wheels hit the stair. Because its center of mass is so far back, the rover falls backwards onto its rear omni-wheels as the front wheels move up the step..
 |
 |
The rover then shifts its weight forward, and the timing works out so that the front wheels are on top of the stair by the time the weight is shifted forward. As the rear wheels move up the stair, the boom is moved back so the rover won't fall over forwards.
 |
 |
The rover senses the changes in state by reading the motor currents required to keep the wheels moving at a constant velocity. Here is a chart showing the motor currents vs. time and a video of the rover climbing the stair.
The rover's primary sensor is the CMUcam vision system, mounted on a pan/tilt head. The camera has the ability to track colors of a specified color range. You can see from the picture of the hand the pixels that match skin color. The red dot is at the average position of the tracked pixels and this output is most useful for tracking landmarks.
 |
 |
 |
In addition to the camera, the rover has infrared range finders on either side used for obstacle detection and avoidance.

These pictures of the rover show how far the rover can shift its weight forwards and backwards without falling over.
 |
 |
When the rover is resting on the omni-wheels, it can operate as a differential drive robot. With the differential, it can move over small objects while keeping all 4 wheels on the ground.
 |
 |
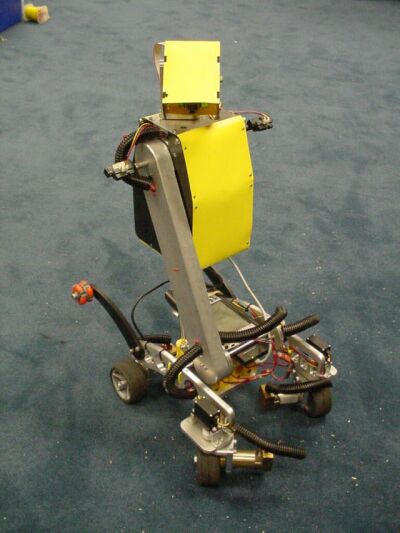
These two pictures are of the completed rover demonstrating Ackerman steering and rotating in place. Below them an incomplete rover is showing the same competencies.
 |
 |
 |
 |
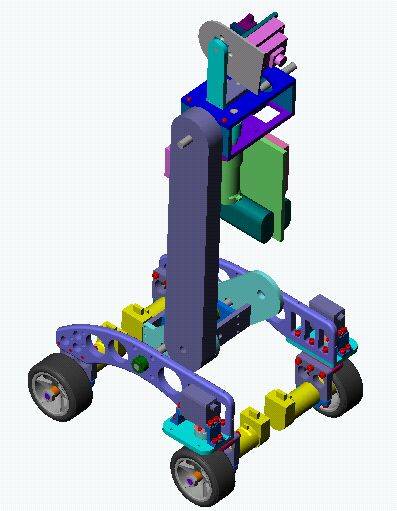
| At right, you can see a CAD model of the rover. |
 |
The movies below demonstrate
the Rover1's mechanism and vision system:




