 The Personal Rover Project: Rover1
The Personal Rover Project: Rover1 [ Overview | Robot | Interface | Downloads | Q & A | People ]
The Personal Rover Project: Rover1
Interface

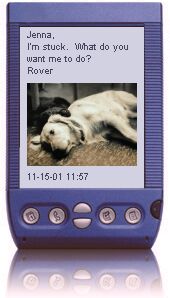
A fully functional interface
would allow for a high degree of user interaction, achieved by doing things
such as sending messages to your PDA, as in the following image:
The following are screenshots
from our current working implementation (available in the downloads
section).
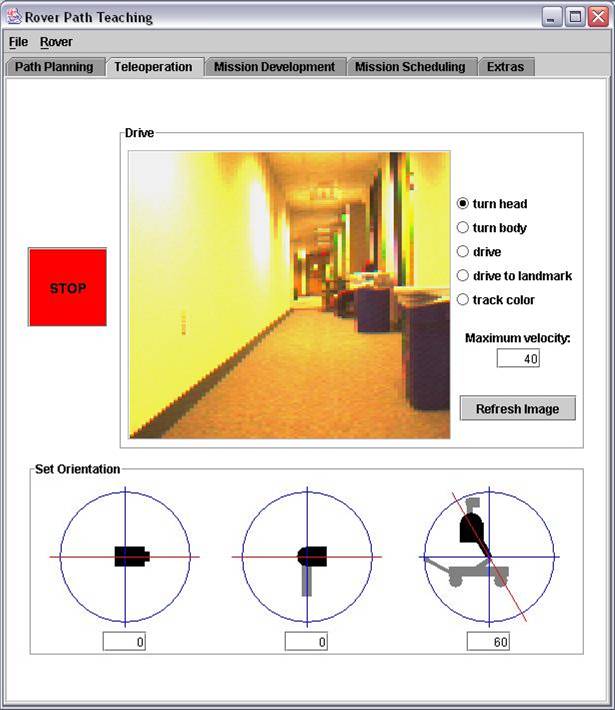
A point-and-click teleoperation interface. Users can click directly on the image of
what the rover sees, and have it turn its head or drive to the clicked point.
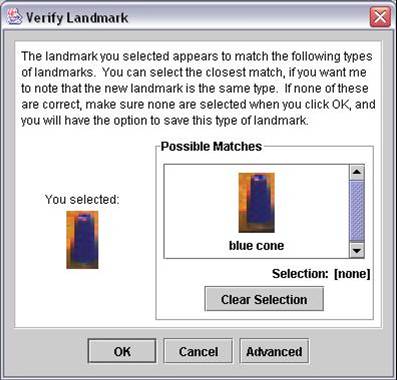
Teaching the rover a new path (click to enlarge):

During teaching, the Rover tries to match its database of already taught landmarks to new ones being selected, and ask the user for input. Brightly colored objects, like these small cones, make good landmarks.

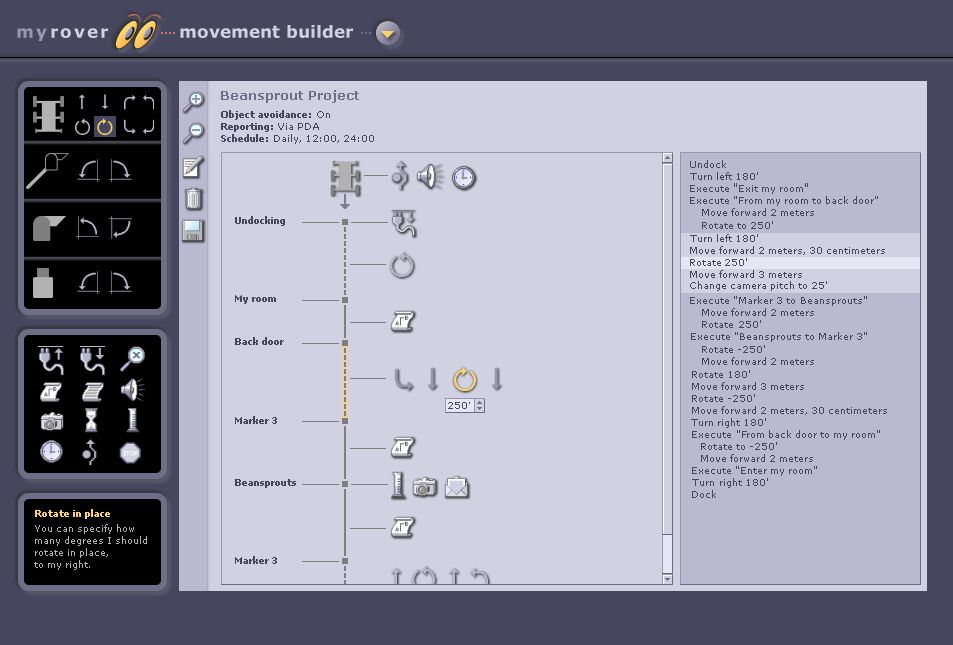
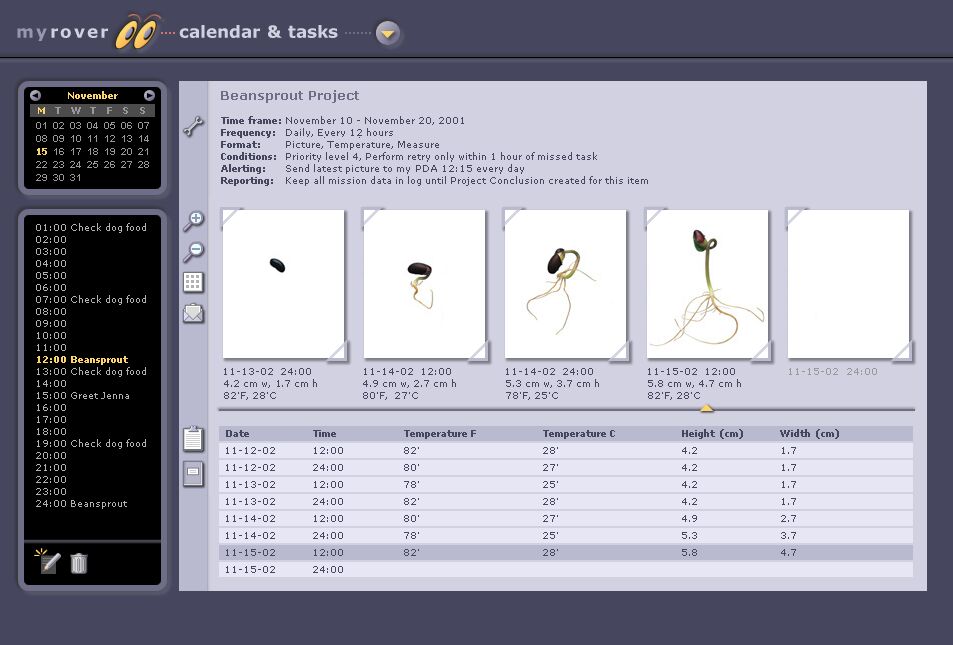
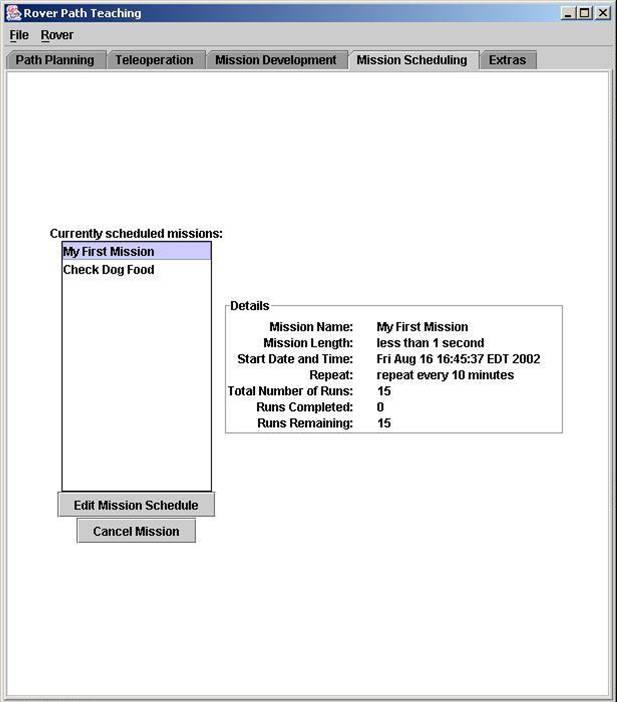
The following screenshots are of the mission development and scheduling interfaces (click to enlarge). The user can build a mission for the rover by combining individual actions and paths. After building a mission, the user can choose when and how often the mission should run. Under the Mission Scheduling tab the user can see all of the scheduled missions and view the details of their individual schedules. Here the user can also edit a mission schedule or cancel a mission.

The Java source for the interface is available from the Downloads section.
See the interface (and the Rover!)
in action! Videos are available at the bottom of the Robot
section. Especially check out the last one of the rover learning a landmark-based
route.