 |
Cristian Dima -- cdima+@cs.cmu.edu,
Mihai Budiu -- mihaib+@cs.cmu.edu
mai 2000
Imaginea pe care majoritatea dintre noi o au despre roboţi vine în principal din filme ca ``Războiul Stelelor'' şi ``Star Trek'' şi în secundar din imagini ale plictisitoarelor linii de asamblare ale automobilelor japoneze. Contrastul dintre aceste două imagini a produs o anumită dezamăgire a publicului în ceea ce priveşte robotica: în definitiv, după atîţia ani de progres tehnologic, nu avem încă roboţi cărora sa le putem vorbi şi care să poată fi de ajutor în îndeletnicirile casnice. Nici nu poate fi vorba de roboţi care sa lupte în război, să piloteze naveta spaţială sau alte ocupaţii frecvente în romanele ştiinţifico-fantastice. Există deci tendinţa de a cădea în cealaltă extremă, de a presupune că nu există decît roboţi plicticoşi, buni doar pentru asamblarea plăcilor electronice şi a automobilelor.
Realitatea contrazice însă ambele imagini. E adevărat că nu avem încă roboţi cărora să le putem vorbi, avem însă roboţi care au participat cu mult succes la operaţii chirurgicale extrem de complicate; nu avem încă soldaţi-roboţi, armata americană este în schimb unul dintre cei mai mari investitori în tehnologie robotică, şi deşi rezultatele sunt departe de ``Terminator-i'', există roboţi care pot contribui în mod eficace la salvarea de vieţi omeneşti (cum ar fi celebrul robot care a fost trimis să inspecteze Cernobîl).
E naiv să ne aşteptăm ca robotica să pornească de la zero şi să ajungă într-un timp relativ scurt (cam cinci decenii de la primele prototipuri funcţionale) la performanţe comparabile cu cele omeneşti. Deşi încă departe de visele pionierilor din domeniu, robotica ne aduce în fiecare zi un pic mai aproape de ele, iar acest progres este în continuă acceleraţie.
Cel puţin cercetătorii din robotică au planuri foarte ambiţioase şi pline de optimism. În acest articol vom încerca să vă comunicăm unele din motivele optimismului lor.
Dacă există discipline spectaculoase în ştiinţa calculatoarelor, atunci cu siguranţă robotica este pe locul întîi. Desigur, se poate argumenta că roboţii sunt de fapt o disciplină separată; importanţa calculatoarelor în componenţa lor este însă din ce în ce mai mare, după cum sperăm să arătăm cu acest articol, aşa că ne vom permite să catalogăm robotica drept o sub-disciplină a informaticii. Cel mai potrivit este deci să povestim despre robotică prin exemple concrete.
Vom folosi deci drept exemplificări proiecte realizate în cadrul Institutului de Robotică al Universităţii Carnegie Mellon din Statele Unite. Pentru început, cîteva fapte despre această instituţie:
Institutul de Robotică al CMU este cel mai mare institut de învăţămînt superior de specialitate din lume. Personalul constă în 57 de profesori, 67 de studenţi la doctorat, 14 post-doctoranzi, şi 83 de cercetători. Institutul oferă diplome de master şi doctorat în robotică; fondurile de cercetare se ridică la peste 30 de milioane de dolari anual. Aceste cifre sunt cu adevărat impresionante, mai ales dacă socotim că resursele sunt dedicate roboticii: puţine alte universităţi au departamente de calculatoare care sunt atît de mari, ori aceasta este doar o sub-diviziune a şcolii de calculatoare de la CMU.
Aceste resurse impresionante se reflectă printr-un uriaş număr de proiecte (peste o sută) din toate domeniile roboticii; pagina de web (indicată în secţiunea ``Alte surse de informaţie'') are legături spre multe din aceste proiecte (dar nu toate). În mod necesar, vom putea ilustra acest text cu doar cîteva dintre ele, poate nu întotdeauna cele mai reprezentative.
Menirea acestui text este să ilustreze teoria că robotica este un domeniu extrem de complex, care rezultă din îmbinarea foarte multor domenii disjuncte. Cercetarea în robotică se desfăşoară în fiecare din aceste direcţii simultan. Unele dintre proiecte se desprind şi devin autonome: de exemplu vom vedea mai multe proiecte al căror scop originar era de a înzestra robotul cu percepţie prin prelucrarea imaginilor, însă mai tîrziu au devenit subiecte de cercetare în sine. Chiar dacă în forma prezentată ele aduc mai mult cu prelucrarea de imagine, sau cu viziunea automată (computer vision) decît cu construcţia de roboţi, cercetarea este desfăşurată în Institutul de Robotică.
Cred că este instructiv să trecem în revistă domeniile de interes central pentru cercetarea în robotică. Dar înainte de a vedea ce se cercetează, să vedem întîi ce nu se cercetează.
În general cercetarea academică în robotică (adică cea făcută în universităţi) nu se ocupă de probleme de ``nivel scăzut'', cum ar fi: motoare, probleme electrice, construirea de hardware. În trecut universităţile trebuiau să dezvolte nu numai ``creierul'' robotului, ci şi toate celelalte ``organe'' ale lui. Dar în clipa de faţă companiile industriale produc piese de o calitate care nu poate fi atinsă în producţie de serie mică la un cost rezonabil.
Ca atare, cercetarea fundamentală în robotică se desfăşoară în zona teoriei şi algoritmilor. Cercetătorii din robotică se află la intersecţia următoarelor domenii: inteligenţa artificială, statistică, algoritmi, geometrie, geometrie diferenţială, algebră, teoria sistemelor. Unele proiecte ``evadează'' în ramuri exotice, cum ar fi neuro-biologie, psihologie, medicină, fizică şi mecanică, etc., în funcţie de aplicaţiile roboţilor cu pricina.
Cercetarea în domeniul electro-mecanic este în general limitată în descoperirea unor tehnologii noi (de exemplu roboţi care folosesc cîmpul magnetic, dispozitive micro-electro-mecanice -- roboţi de cîţiva microni, mijloace extreme de locomoţie -- roboţi-păianjen, roboţi extratereştri pentru gravitaţie redusă, etc.).
Construcţia unui robot cere cunoştinţe din domenii foarte diferite. Pentru a îndeplini chiar o misiune foarte simplă, este nevoie de sisteme complicate, care acoperă multe discipline.
În mare, robotica poate fi divizată în trei domenii: percepţie, cogniţie şi acţiune. Această diviziune e naturală: un robot trebuie în general să ``simtă'', pentru a primi informaţii despre mediul înconjurător. Informaţiile în sine însă nu folosesc la nimic: robotul trebuie sa ``inţeleagă'' ce se petrece, să construiască planuri, să evalueze situaţii, etc. Aceasta este partea de cogniţie. Un robot ar fi inutil dacă nu ar putea să facă ceva: să se deplaseze, să transforme în mod intenţionat mediul înconjurător, să exploreze, într-un cuvînt, să acţioneze.
În anumite cazuri putem elimina cogniţia, obţinînd fie ceea ce se numeşte teleoperare (operare de la distanţă), în care caz nu există decizie la nivelul robotului, fie celebrii roboţi lucrători la o linie de asamblare.
Sa studiem deci fiecare domeniu în parte.
Percepţia include practic tot ceea ce ţine de senzorii prin care robotul poate primi informaţii despre mediul în care operează. Diversitatea senzorilor este practic nelimitată: un robot poate înregistra imagini, măsura distanţe, acceleraţii, cîmpuri magnetice, orientări, poziţii geografice, viteze, etc. Vom încerca să alcătuim o listă (inevitabil incompletă) a senzorilor utilizaţi pentru percepţie în robotică.
Anumite informaţii sunt foarte greu de extras din imagini: pentru a recupera de exemplu informaţie tridimensională este nevoie fie de camere stereoscopice fie de algoritmi care folosesc imagini succesive pentru a recupera informaţia pierdută prin proiecţia de la 3D la 2D.
Camerele de luat vederi sunt însă foarte ieftine în comparaţie cu alţi senzori. Pentru comparaţie să vedem alte două sisteme: un sistem de telemetrie prin laser este incomparabil mai precis, mai uşor de folosit şi mai puţin sensibil la iluminaţie. Un sistem stereoscopic (cu două, trei sau mai multe camere de filmat) trebuie calibrat, funcţionează numai în anumite condiţii (nu poate de exemplu măsura distanţa către obiecte care au o culoare uniformă) şi poate fi făcut inutilizabil de umbre. Un sistem laser costa între 10 şi 50 de mii de dolari; un sistem stereoscopic performant aproximativ 1500-2000 de dolari.
Laserele însă au şi probleme, cele mai mult inerente principiilor de funcţionare. În cazul laserelor care măsoară distanţe, pentru a obţine informaţie despre o întreagă scenă, raza trebuie baleiată pe o arie mare; cum însă rezoluţia unghiulară cerută în cele mai multe dintre aplicaţii este relativ mare (cîteva zecimi de grad atît în plan orizontal cît şi vertical) şi creşte proporţional cu distanţa obiectelor scanate, este foarte dificil (din punct de vedere mecanic) de construit un sistem care va scana cu rezoluţie mare şi în acelaşi timp foarte repede.
Un laser pentru măsurat distanţa este caracterizat prin numărul de grade de libertate (0, 1 sau 2), prin numărul de puncte măsurate într-o singură trecere şi prin numărul de astfel de treceri ce pot realizate într-o secundă. Limitarea laserilor nu este în măsurarea distanţei (de obicei mult mai precisă decît necesar pentru majoritatea aplicaţiilor) ci din procesul (pînă acum mecanic) de poziţionare a razei laser şi din rata de transfer a informaţiei.
Am spus ``pînă acum mecanic'' pentru că relativ recent au apărut laseri fără părţi mobile, în care direcţia razei este controlată electronic, prin reflexie pe cristale lichide. Deşi în prezent astfel de sisteme există doar în laboratoare, ele promit performanţe interesante: permit scanarea cu viteze mult mai mari şi au o uzură redusă.
Pentru a încheia această discuţie despre laseri trebuie să menţionăm încă o problemă: laserii au dificultăţi cu ceaţa, ploaia, ninsoarea, şi mai ales cu soarele puternic. În cazul primelor trei, raza laser este reflectată de particulele de apă. În cazul soarelui, un laser cu putere mai mare nu ar avea de suferit din cauza iluminaţiei naturale, însă într-un mediu populat, laserul poate dăuna retinei trecătorilor1.
Numeroase proiecte folosesc renumitul GPS, (acronim pentru Global Positioning System), un sistem de localizare prin satelit disponibil oriunde pe glob şi care oferă precizii uluitoare: chiar şi în cazul aplicaţiilor civile2 se pot atinge precizii de numai cîţiva centimetri! Un sistem de sateliţi emite tot timpul semnale electronice; semnalele de la mai mulţi sateliţi pot fi combinate pentru a afla poziţia relativă faţă de sateliţi; din asta se poate calcula poziţia pe suprafaţa pămîntului. Deşi limitate doar la aplicaţii în aer liber şi cu un cost ridicat, precizia şi simplitatea sistemelor GPS a le-a impus în multe aplicaţii ale roboţilor.
Alţi senzori utilizaţi frecvent sunt inclinometrele şi accelerometrele. Preţurile lor sunt relativ scăzute (crescînd o dată cu precizia) iar aplicaţiile numeroase.
Înainte de a încheia aceasta enumerare trebuie menţionat că acestea nu sunt decît cîteva dintre opţiunile disponibile. Alegerea senzorilor potriviţi depinde de mediul în care robotul va funcţiona, de resursele financiare şi, nu în ultimul rînd, de experienţa constructorului. Un robot care funcţionează în interiorul clădirilor nu trebuie sa ia atît de mult în calcul problemele impuse de iluminaţia naturală. Un tractor robotizat nu are nevoie să detecteze obstacole de cîţiva centimetri. Regula generală este că dificultatea dezvoltării unui robot este invers proporţională cu numărul de restricţii impus asupra mediului de funcţionare. Diferenţa între un robot care merge excelent în laborator, unde ``dificultăţile'' sunt cu grijă eliminate prin configuraţia experimentului şi un robot capabil sa ducă la bun sfîrşit o misiune într-un mediu natural este extrem de mare.
Una dintre aplicaţiile cele mai interesante dezvoltate la Institutul de Robotică CMU este laboratorul de ``realitate virtualizată'' (a nu se confunda cu realitatea virtuală). Laboratorul constă într-o încăpere în care 49 de camere de filmat digitale sunt plasate pe pereţi şi tavan, astfel încît orice punct din spaţiu este vizibil cîtorva camere, indiferent de obiectele din încăpere. Toate camerele de filmat sunt atent calibrate (ceea ce înseamnă că se pot stabili corespondenţe între imaginile oricăror două camere: pentru orice punct vizibil în cel puţin două obiective se pot obţine coordonate în spaţiul tri-dimensional) şi sincronizate, astfel încît toate să înregistreze imagini în acelaşi timp. Folosind principiile stereoscopiei se pot obţine modele tridimensionale pentru orice eveniment petrecut în această cameră.
|
Sistemul prelucrează apoi informaţia înregistrată şi construieşte un model (descris în limbajul VRML) tri-dimensional pentru fiecare moment din secvenţa înregistrată. Cu metode împrumutate din grafica pe calculator se poate extrage informaţie despre forma, culoarea şi textura suprafeţelor vizibile.
Din momentul în care un astfel de model tridimensional este disponibil şi cunoaştem culoarea fiecărui punct, putem genera o imagine artificială a aceste scene, văzută din orice punct de vedere (chiar din puncte în care iniţial nu avem camere de filmat). Acest lucru poate fi realizat pentru fiecare moment din secvenţa înregistrată: ca urmare, se poate alege chiar o traiectorie pentru camera de filmat, şi putem obţine o secvenţă video care simulează ceea ce ar fi văzut o cameră de luat vederi în mişcare de-a lungul traiectoriei respective.
Deşi calitatea imaginilor obţinute nu este perfectă, iar procesarea nu se poate face în timp real, una dintre aplicaţiile deja negociate cu sponsori interesaţi constă în a înregistra meciuri de basket din NBA; spectatorul apoi poate controla în trei dimensiuni poziţia camerei ``virtuale'', care-i furnizează informaţia video. De exemplu, spectatorul ar putea viziona meciul din punctul de vedere al unui arbitru, din punctul lui Shaquille O'Neal sau chiar din punctul de vedere al mingiei.
Un proiect deosebit de fascinant din domeniul percepţiei este cel
numit ``modelare cu camera video'' (modelling by videotape).
http://www.ius.cs.cmu.edu/IUS/mbvc0/www/modeling.html
Problema care se dă este următoarea: mă plimb cu camera de filmat în jurul unui obiect. Pot să reconstitui doar din aceaste imagini:
Asumpţia de bază este că obiectul filmat este rigid (nu se deformează în timpul filmării). Cercetări de ultimă oră au extins această metodă pentru scene care conţin mai multe obiecte rigide în mişcare relativă unele faţă de altele.
Rezultatele sunt deosebit de spectaculoase (pagina de web conţine mici filme demonstrative): de exemplu, mişcări de mică amplitudine în jurul unei scene din bucătărie (ca şi cum cel care filmează se clatină) permit reconstituirea deplină a formei acesteia şi vizualizarea din orice unghi. Figura 2 explică procedura pe scurt.
 |
Tehnica are o eficacitate excelentă: în pagina de web există o demonstraţie a unui teren filmat din avion de la mare înălţime; nici cu ochiul nu poţi spune prea clar ce se întîmplă jos. Calculatorul însă este capabil să construiască o hartă completă de elevaţii a terenului. Aplicaţiile comerciale şi militare ale tehnologiei sunt evidente.
Roboţii au nevoie de o putere substanţială de calcul pentru a procesa informaţiile venite de la senzori, extrăgînd trăsăturile esenţiale. Dar odată aflate informaţiile esenţiale, mai rămîne de pus la punct setul de acţiuni care trebuie îndeplinite pentru a duce la bun sfîrşit sarcinile robotului. Aici intră în joc ``creierul'' robotului.
Prin asemuire cu funcţiunea principală a creierului uman, numim această activitate a robotului ``cogniţie''. Putem distinge trei mari tipuri de activitate ``cognitivă'': învăţare, planificare şi control.
Învăţarea poate avea aspecte extrem de variate, de la memorare pur mecanică pînă la acţiuni ``inteligente''.
Putem argumenta că funcţia principală a unui robot este planificarea. Ideal noi îi specificăm robotului doar un scop care trebuie atins, iar robotul are la dispoziţie o mulţime de mişcări elementare. Robotul trebuie să pună cap la cap o serie de astfel de mişcări care conduc la realizarea scopului.
Planificarea se poate face la nivele diferite, şi poate fi extrem de sofisticată dacă avem de-a face cu un mediu în schimbare şi în care avem constrîngeri dinamice importante:
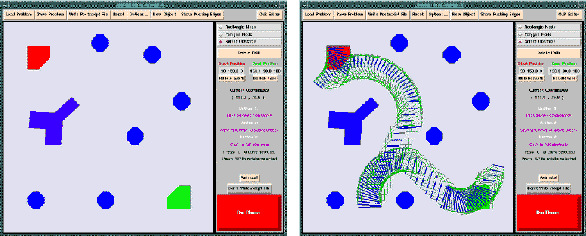 |
Pe culoarele universităţii Carnegie Mellon poţi adesea vedea nişte roboţei care se plimbă de ici colo şi caută lume în clădire; unii din aceşti roboţi pot fi comandaţi de la distanţă, prin Internet: http://jubilee.learning.cs.cmu.edu:8080/.
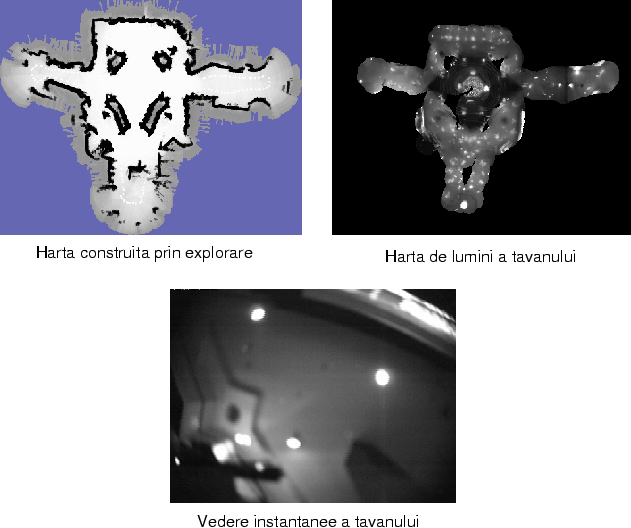
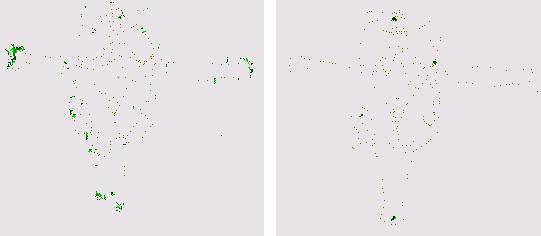
Un grup de cercetare a vrut să împingă această idee mai departe, şi a construit un robot care face pe ghidul în muzeu. Robotul Minerva 4 a funcţionat în Muzeul de Istorie Naturală Smithsonian din Washington DC în vara anului 1988 http://www.cs.cmu.edu/~minerva.
 |
Problemele principale investigate cu această ocazie au fost navigaţia într-un spaţiu necunoscut şi evitarea obstacolelor (inclusiv a persoanelor).
Iată pe scurt unele din problemele ivite şi algoritmii folosiţi pentru a le rezolva:
 |
 |
În fine, una dintre problemele binecunoscute este cea a algoritmilor de control (control theory). Aşa cum nu putem conduce o maşină cu 100 km/h pînă în parcare, pentru că nu putem opri instantaneu, nici roboţii nu pot face mişcări arbitrare.
Teoria controlului dezvoltă algoritmi care să permită roboţilor sa se deplaseze în mod stabil; algoritmii de control cunosc doar unii din parametrii sistemului; pe ceilalţi îi pot observa din chiar comportarea robotului. Algoritmii observă permanent deviaţia de la traiectoria ideală stabilită de planificator şi generează comenzi de corecţie.
Dar aşa cum o învîrtire bruscă de volan poate răsturna maşina, sau poate duce la o oscilaţie periculoasă, simpla încercare de a corecta imediat traiectoria se poate solda cu catastrofe; algoritmii de control iau în calcul aceste lucruri cînd coordonează mişcarea.
În fine, ajungem la ultima mare parte a roboticii, acţiunea. Roboţii pot folosi cele mai diverse mijloace de locomoţie; de la roboţi umanoizi, cu picioare (care de altfel sunt foarte greu de construit) pînă la şerpi şi ţopăitori, avem de-a face cu o gamă extrem de largă de dispozitive. Iată aici unele dintre ele:
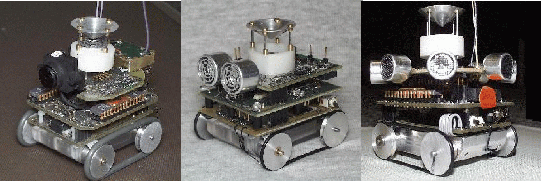 |
În cadrul proiectului se lucrează în prezent la un mecanism de cuplare care va permite miliboţilor sa se cupleze între ei, formînd fie o ``roată'', fie un pod, fie alte configuraţii care vor spori mobilitatea sistemului. Cea mai mare problemă în astfel de proiecte este dificultatea stocării unei cantităţi suficiente de energie în puţinul spaţiu disponibil.
 |
 |
Utilizatorul poate urmări pe ecran (într-o simulare grafică) rezultatele acţiunilor sale, şi poate simţi prin intermediul manetei coliziunile, vibraţiile, frecarea, etc. În figura 9 de exemplu, utilizatorul primeşte senzaţia frecării celor doua suprafeţe şi a vibraţiilor produse la introducerea obiectului în locaşul pătrat.
Interfeţele haptice sunt folosite în general pentru antrenarea în acţiunile în care coordonarea între mîini şi sistemul vizual este crucială: de exemplu chirurgie sau pentru manevre în imponderabilitate.
Anual se desfăşoară o competiţie în care echipe din întreaga lume îşi compară elicopterele autonome, pe care CMU se mîndreşte a o fi cîştigat anul trecut. Elicopterul (de mărime redusă, produs iniţial pentru împrăştierea pesticidelor prin zbor telecomandat) poate decola, ateriza şi naviga complet autonom, iar în cadrul competiţiei a fost capabil de a executa zbor la punct fix în condiţii de vînt şi de a recupera un mic obiect metalic de pe sol cu ajutorul unei macarale magnetice. Demonstraţii cu adevărat impresionante şi detalii ale concursului sunt disponibile on-line la http://www.cs.cmu.edu/afs/cs/project/chopper/www/
Ceea ce face acest proiect deosebit de dificil este că nu exista o stare de echilibru stabil: odată în zbor, dacă ceva nu funcţionează perfect, elicopterul nu se poate opri şi aştepta ajutor, ca în cazul roboţilor ``clasici''. Un eşec de genul acesta este echivalent cu pierderea întregului aparat, suficient de costisitor. Pentru a reduce probabilitatea unor astfel de catastrofe, s-a încercat reducerea pe cît posibil unor sisteme critice unice. De exemplu, pentru a-şi menţine nivelul orizontal în timpul zborului, elicopterul foloseşte inclinometre (două giroscoape care măsoară înclinaţia), cît şi un sistem care extrage poziţia elicopterului din imagini video. Pentru aprecierea distanţelor parcurse elicopterul foloseşte atît un sistem GPS, cît şi un sistem vizual, care măsoară viteza pămîntului în imaginile luate, o cuplează cu altitudinea de zbor, şi extrage o aproximaţie a vitezei reale.
Se lucrează în continuare atît la îmbunătăţirea algoritmilor de control, cît şi la aplicaţii; în prezent există un sistem care foloseşte telemetrie laser şi stereoscopie pentru a alcătui din zbor o hartă 3D de foarte mare rezoluţie.
Deşi există foarte multe proiecte în lume care se concentrează asupra realizării roboţilor umanoizi, se pare ca firma japoneza Honda are un avans considerabil faţă de alţi competitori. Ei au construit deja un robot umanoid care arată aproape exact ca un cosmonaut într-un costum etanş. Deşi robotul este capabil să păşească şi să urce scări, există încă probleme imense: sistemul de viziune -- extrem de ambiţios -- va necesita încă ani buni de cercetare pentru a deveni capabil să extragă informaţii din mediul înconjurător cu viteza şi precizia necesară.
Într-un alt proiect, sponsorizat de NASA, s-a realizat un ``bust'' umanoid care va lucra în spaţiu, în exteriorul navetei spaţiale. Proiectul a construit deja o mînă artificială cu 19 grade de libertate: tot atîtea cît o mînă umană! Puneţi la socoteală faptul ca ``mîna'' poate exercita o forţă incredibilă şi că are suficient de multă precizie pentru a desface şuruburi mai mici de un centimetru fără unelte, şi veţi avea o idee despre minunăţia electro-mecanică de care vorbim.
Dacă vedem deplasarea dintr-un loc într-altul ca pe o succesiune de puncte, atunci găsirea unei traiectorii este o problemă de planificare. Dacă putem la socoteală şi faptul că o maşină nu poate coti la unghi drept, ci trebuie să ia curbe, şi faptul ca viteza nu-ţi permite să iei o curbă oricît de strînsă, avem de-a face (aşa cum am văzut) cu o problemă mai complicată, de control. Dacă însă vrem să manipulăm obiecte în mişcare rapidă (de exemplu obiecte aruncate), atunci avem de-a face cu o problemă şi mai complicată, a manipulării dinamice.
Puteţi vedea mai multe variaţiuni pe această temă în felurite proiecte; profesorul Matt Mason, un jongleur amator foarte priceput, îşi propune să construiască roboţi capabili să ``jongleze''.
 |
Aceasta este o problemă deosebit de dificilă de planificare într-un spaţiu continuu şi de teorie a controlului: robotul ştie doar ecuaţiile fizicii (acceleraţia gravitaţională, legile lui Newton, etc.) şi parametri proprii (viteza cu care-şi poate mişca braţul, inerţia, etc.). Robotul trebuie să planifice cum să arunce, împingă, susţină, încline, lovească, etc. un obiect pentru a-l aduce într-o poziţie dorită.
Unul dintre proiectele cele mai faimoase este Navlab:
http://www.ri.cmu.edu/labs/lab_28.html. Scopul proiectului
este de a dezvolta maşini autonome, care pot conduce pe autostradă
fără intervenţie umană (problema condusului prin oraş
depăşeşte adesea chiar şi capacitatea omului, aşa că este o
temă de cercetare viitoare). O demonstraţie a reuşitei a fost
turneul ``no hands accross America'', în care un vehicul autonom a
parcurs Statele Unite de la este la vest, 4000 de kilometri, cu
intervenţie umană minimă (98,2% din timp vehiculul a condus
singur), la o viteză de pînă la 140 km/h! Maşina schimba chiar
şi banda de una singură.
Un proiect de genul Navlab îmbină laolaltă extrem de multe tehnologii diferite. Ideal este ca, deşi fiecare din tehnologii este imperfectă, combinaţia lor să fie mai robustă decît fiecare în parte. Vehiculele folosesc multe tipuri diferite de senzori: GPS pentru poziţie, radare pe unde ultrascurte şi lasere în infraroşu (pentru detecţia obstacolelor), camere de filmat stereoscopice cu trei şi cinci obiective (pentru urmărirea şoselei), algoritmi cu reţele neurale pentru urmărirea şoselei, algoritmi de control dinamic pentru calculul frînării, acceleraţiei, schimbării de direcţie, şi multe alte tehnologii.
Rezultatele proiectului sunt evaluate de firma Toyota pentru construirea unor sisteme automate de prevenire a ieşirii din şosea (în fiecare an 3000 de accidente în Statele Unite sunt produse de somnul la volan).
Trebuie să oprim aici înşiruirea de informaţii, care ar putea continua pe întreg conţinutul revistei. Oferim cititorului interesat, ca punct de pornire, cîteva cîteva adrese pe web unde se pot găsi informaţii despre robotică:
http://www.ri.cmu.edu: Institutul de Robotică al universităţii Carnegie Mellon. Această pagină are legături la peste o sută de proiecte ale institutului, precum şi spre multe alte informaţii.
http://www.frc.ri.cmu.edu/robotics-faq/: Întrebări frecvente despre roboţi (Robotics FAQ). Documentul pare cam învechit (ultima modificare este aparent în 1996), dar nu am găsit unul mai recent pe Internet.
http://www-robotics.cs.umass.edu/robotics.html: Resurse Internet despre roboţi: o colecţie de legături spre informaţii utile despre robotică, începînd cu programe educaţionale, trecînd prin industrie şi terminînd cu jucării.
http://www.cs.cmu.edu/~cil/vision.html: Pagina ``viziunii automate'' (Computer Vision): o colecţie centralizată de informaţii despre percepţie, prelucrare de imagine şi viziune automată.
http://www.soundvisioninc.com/publications.htm: pentru mai multe detalii legate de procesul de funcţionare al camerelor de filmat şi digitizoarelor.
http://www.nuhorizons.com/Home/tech/newgps.html-ssi: pentru mai multe informaţii legate de sistemele GPS.
Cristian Dima tocmai a terminat primul an de doctorat în cadrul Institutului de Robotică al Universităţii Carnegie Mellon. Cercetarea lui este în domeniul ``computer vision'' , mai precis în cel al detecţiei obstacolelor folosind informaţii vizuale. Este membru al proiectului ``Automated Sprying'', care de ocupa de robotizarea unui tractor ce poate îndeplini în mod autonom diferite operaţiuni agricole.
Mihai Budiu intră în această toamnă în al patrulea an de doctorat în cadrul Departamentului de Calculatoare al Universităţii Carnegie Mellon. Deşi cercetarea sa este orientată în alte direcţii, este profund fascinat de proiectele Institutului de Robotică, care-i dau adesea senzaţia că priveşte romane SF ieftine.