Douglas L. Vail
I just (as in spring '08) completed my Ph.D. under the guidance of Manuela Veloso and John Lafferty. Starting
in the summer of 2008, I will be working as a software engineer for
Google at their Pittsburgh location.
Research
I am an interested in machine learning both in
general and in the specific case of how ML can be applied to problems,
such as activity recognition, in robotics. I work with
undirected graphical models called conditional random
fields. Specifically, I am looking at methods for efficiently training
CRFs as well as methods for efficient feature selection in CRFs.
These days, my research is a little bit removed from working on
actual robots (although most of my data comes from real robots), but
in the past I have worked on developing behaviors, coordination
algorithms, and vision for our robot soccer team that competes in the
AIBO league of RoboCup. (Here
are some photos from the
first time I was involved in 2002)
Publications
Douglas L. Vail.
Conditional Random Fields for Activity Recognition.
Ph.D. Thesis. April, 2008. [PDF]
Douglas L. Vail and Manuela M. Veloso.
Feature Selection for Activity Recognition in Multi-Robot Domains.
AAAI 2008. [PDF]
Douglas L. Vail, John D. Lafferty, and Manuela M. Veloso. Feature Selection in Conditional Random
Fields for Activity Recognition. IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS) 2007. [PDF]
Noah A. Smith, Douglas L. Vail, and John D. Lafferty. Computationally Efficient M-Estimation of
Log-Linear Structure Models. ACL 2007. [PDF]
Douglas
L. Vail, Manuela M. Veloso, and John D. Lafferty. Conditional Random Fields for Activity
Recognition. International Conference on Autonomous Agents and
Multi-agent Systems (AAMAS), 2007. [PDF]
Manuela M. Veloso,
Nicholas Armstrong-Crews, Sonia Chernova, Elisabeth Crawford, Colin
McMillen, Maayan Roth, and Douglas Vail. A Team of Humanoid Game Commentators.
In Proceedings
of Humanoids 2006. [PDF]
Douglas Vail and Manuela Veloso. Learning
from accelerometer data on a legged robot. In
Proceedings of the 5th IFAC/EURON Symposium on Intelligent Autonomous
Vehicles (IAV2004), Lisbon, Portugal, July 2004. [PDF]
Manuela Veloso, Scott
Lenser, Douglas Vail, Paul E. Rybski, Nick Aiwazian, and Sonia
Chernova. CMRoboBits: Creating and
Intelligent AIBO Robot. In Proceedings of the AAAI Spring
Symposium on Accessible Hands-on Artificial Intelligence and Robotics
Education, Stanford, March 2004. [PDF]
Maayan Roth,
Douglas Vail, and Manuela Veloso. A
world model for multi-robot teams with communication. In
Proceedings of IROS'03, October 2003. [PDF]
Douglas Vail and Manuela
Veloso. Dynamic multi-robot
coordination. In Multi-Robot Systems: From Swarms to
Intelligent Automata, A. Schultz, L. Parker, and F. Schneider (eds.),
Volume II, pages 87--100. Kluwer Academic Publishers, 2003. [PDF]
Movies
If you have
difficulty playing the following movies, they are known to work with
recent versions of VLC, which
is a great (and free) cross-platform media player.
CRFs for
Robot Activity Recognition
 I
am interested in applying
conditional random fields to activity recognition problems that
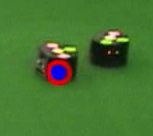
involve robots. This video shows a
simple tag domain where one of the robots is "it" and tries to tag
(approach within 4 cm) of another robot in order to transfer the "it"
role to the tagged robot. The robots are observed by two overhead
cameras and their positions are determined by detecting the colored
markers on the robot tops. The position information is fed into a
conditional random field which uses features (selected via L1
regularization) to determine which of the robots is currently
executing the "it" role - the CRF answers the question: "Who is
it?". In this case, I also wrote the controller that is driving the
three robots, so ground truth is readily available and the robot who
is truly "it" is indicated by the red circle in the video. The robot
identified by the CRF as being it is indicated by the blue circle.
I
am interested in applying
conditional random fields to activity recognition problems that
involve robots. This video shows a
simple tag domain where one of the robots is "it" and tries to tag
(approach within 4 cm) of another robot in order to transfer the "it"
role to the tagged robot. The robots are observed by two overhead
cameras and their positions are determined by detecting the colored
markers on the robot tops. The position information is fed into a
conditional random field which uses features (selected via L1
regularization) to determine which of the robots is currently
executing the "it" role - the CRF answers the question: "Who is
it?". In this case, I also wrote the controller that is driving the
three robots, so ground truth is readily available and the robot who
is truly "it" is indicated by the red circle in the video. The robot
identified by the CRF as being it is indicated by the blue circle.
Robot Soccer
 I
was a member
of CMU's robot soccer team from 2002 through 2005. This video
shows a clip from RoboCup 2005, which was held in Osaka, Japan.
I
was a member
of CMU's robot soccer team from 2002 through 2005. This video
shows a clip from RoboCup 2005, which was held in Osaka, Japan.
Robot Soccer Commentator
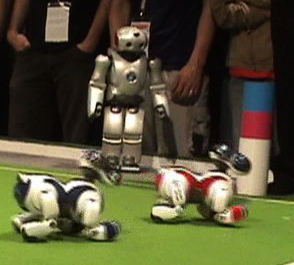 Rather than
working on robot soccer in 2006, I helped develop a pair of
robot commentators that watched other robots play soccer. The robots
in this case were two Sony QRIO robots, which we had on loan from Sony
Research. They used a combination of local vision and information from
a referee's laptop to provide commentary during Aibo games at RoboCup
2006. Here are some highlights
from one of those games. (It would have been a very natural fit, but I
did not have a chance to apply CRFs to the problem of detecting what
was going on in the game. Instead, I worked on the vision system for
the robot)
Rather than
working on robot soccer in 2006, I helped develop a pair of
robot commentators that watched other robots play soccer. The robots
in this case were two Sony QRIO robots, which we had on loan from Sony
Research. They used a combination of local vision and information from
a referee's laptop to provide commentary during Aibo games at RoboCup
2006. Here are some highlights
from one of those games. (It would have been a very natural fit, but I
did not have a chance to apply CRFs to the problem of detecting what
was going on in the game. Instead, I worked on the vision system for
the robot)
Contact Information
If you need to
get in touch, e-mail is by far the best way.
dva...@cs.cmu.edu
Click on the "..." in the above for the full address.