 The CMUcam1 Vision Sensor
The CMUcam1 Vision Sensor
[ Overview | Gallery | Downloads | Q & A | Publications | People ]
The CMUcam1 Vision Sensor
Gallery


The following images
were taken by CMUcam indoors and outdoors:



This next CMUcam image is shown in color and then as separate R, G and B bands:


This next set of CMUcam
images are examples of how of our Java interface program
can be used to display
the color tracking output from CMUcam:




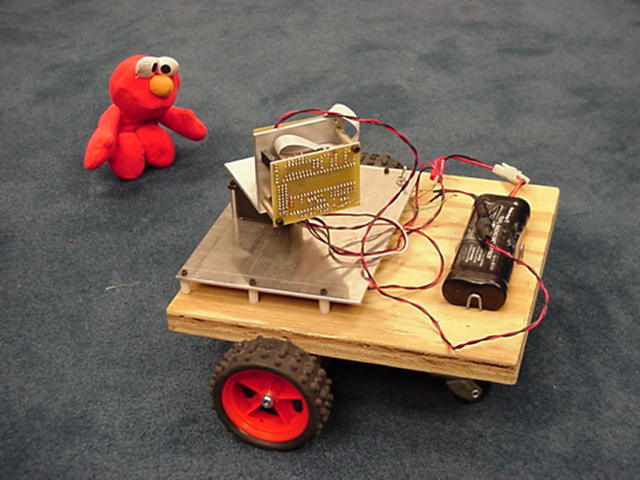
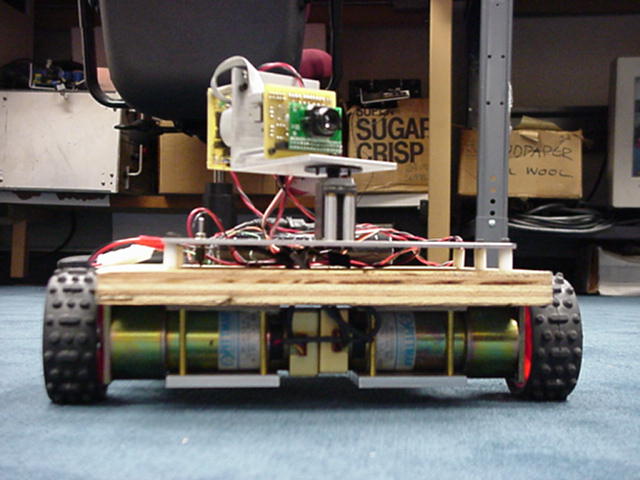
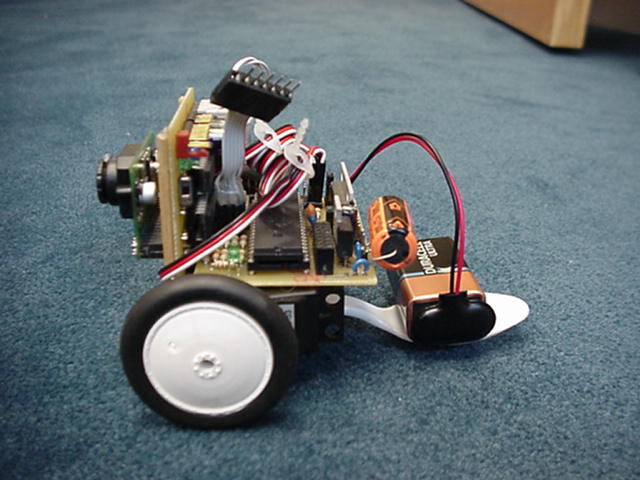
Here is B2Bot, a robot
with CMUcam on a servo head, two DC motors and a custom
controller called
Cerebellum that we are in the process of releasing now:

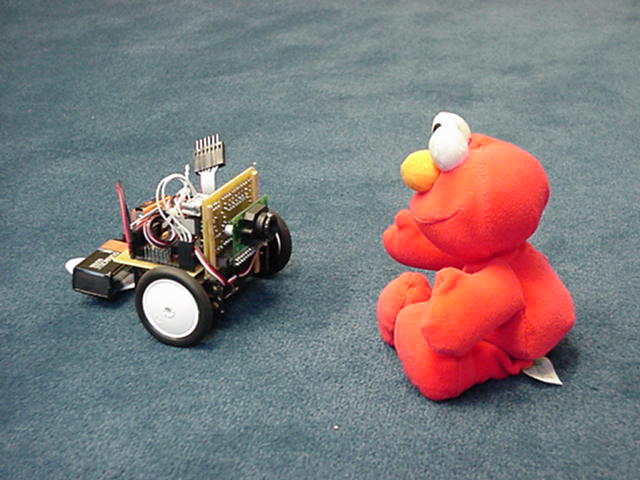
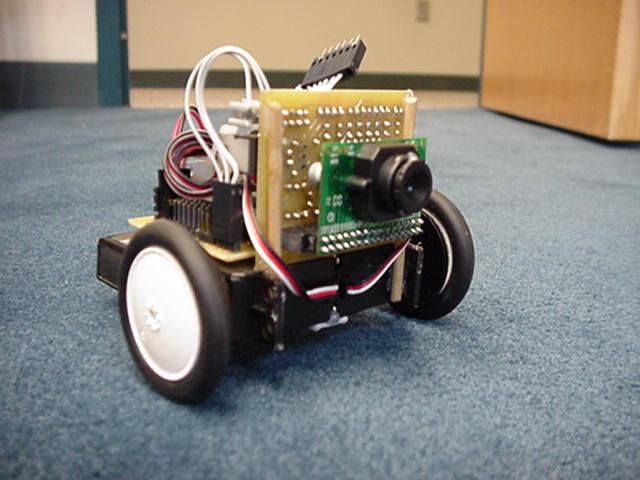
This is MiniBot, a
2-servo CMUcam + Cerebellum robot that is less than 5 inches cubed:
The first picture below shows ServoBot, a CMUcam directly controlling a hobby servo. The rest of the pictures show MiniBot3D, which uses 3 servos to control not just pan but also tilt.



It is easy to
program a robot to follow colorful objects using CMUcam's output. In
fact, if you click here you can download the C code we used to program
the PIC chip that is controlling CMUcam on MiniBot3D.
The movies below show
off our prototype CMUcam robots at play:
Here are links to other pages and projects which describe robots which use the CMUcam: