16-264: Humanoids
Spring 2012
Instructor: Chris Atkeson, cga @ cmu
TA: Siyuan Feng sfeng @ andrew
Time: TR 3-4:20PM
Place: NSH 3002
Units: 12
Events of interest
Darpa Robotics Challenge: Proposers' Day slides
For more information, take a look at
the previous
version of this course.
Resources
-
Jan 17: Introduction
-
Jan 19: Overview of golf project
-
Jan 24: NAO demo
-
Jan 26: Simulating sliding and rolling contact
-
Jan 31:
Golf simulation
Golf with wheeled
robot: Zickler
-
Feb 2: Planning
-
Feb 7: Planning, Memory-based Reasoning
-
Feb 9: Darwin-OP humanoid demo
-
Feb 14: Kinematics
New golf simulation with blimp golfer
-
Feb 16: Inverse Kinematics
-
Feb 21: Using optimization to solve inverse kinematics
example 1,
example 2.
example 3.
-
Gravity compensation
-
Feb 23: Trajectories
-
Feb 28: Static Walking
-
March 1: Dynamic Running, Walking
CMU flip
CMU quadruped
-
March 6: Discussion
-
March 8: Help Session
-
March 20: Dynamic Walking
-
March 22: Actuators, Transmissions
-
March 27: Proprioception
-
March 29: Vision
-
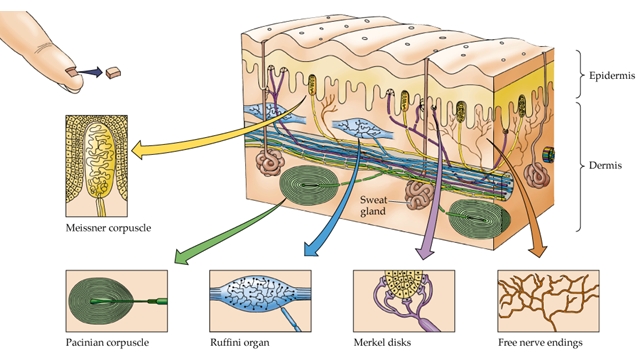
April 3: Skin and tactile sensing
Skin:
another picture.
-
April 5:
Smell and
Taste
-
April 5:
Pattern recognition and
modeling:
Bayes' Law,
Speech recognition,
Clustering,
Regression
-
Hands:
Hand anatomy,
finger anatomy (View as PDF, Fig. 7),
Salisbury,
Shadow,
Robonaut,
Barrett,
High-speed,
High-speed cloth,
Jammer,
GraspIt!,
Wierd
Sushi,
-
Emotions
-
Learning
-
...
-
May 1: Project Presentations
-
May 3: Project Presentations
Assignments
Ways to capture movies of your assignments
-
Assignment 0: Send email to Chris: Who are you? Done any robotics?
Any project ideas? Google and send me some interesting URLs.
Be sure your name is obvious in the email, and you mention the course
name or number. I teach more than one course, and a random email from
robotlover@cs.cmu.edu is hard for me to process.
-
Assignment 1: Install the ODE simulation software
and run the demo programs.
-
Assignment 2: Golf Assignment I Due Feb 13.
-
Assignment 3: Build a Humanoid Parts 1 and 2 due Feb 27,
parts 3 and 4 due March 5.
-
Assignment 4: Send email to Chris and the TA describing your project.
Due March 8.
-
Assignment 5: Walking Due April 30.
-
May 13: Graduating Students: last day to turn in overdue assignments and projects
-
May 17: All Other Students: last day to turn in overdue assignments and projects
Possible Projects:
-
Something involving the Wowwee robot
-
Something involving the Nao
robot
-
Something involving the Darwin robot
-
Implement mini-golf on one of the above robots.
-
Implement vision to see and map a mini-golf hole.
-
Bongo boarding:
Can the Nao or Darwin robot do it?
-
Help us develop a real time Linux robot controller.
-
Help us develop a real time Windows robot controller.
-
Control of the new big dog video
Contact cga
-
State sensing using many accelerometers and gyros, for example using
this,
this,
this,
this,
this,
this,
this,
this,
this,
this,
this,
this,
this,
this, or
this.
Contact cga.
-
Human transfer (helping people with disabilities move from bed to chair
to car etc.)
Contact cga.
-
Dynamic Programming
Contact cga.
-
HERB project.
Contact cga.
-
Neuro/biomechanical modeling and/or walking with new professor Hartmut Geyer.
Contact hgeyer @ cs.
-
Hands (Nancy Pollard, HERB project).
Contact nsp @ cs or cga.
-
You suggest something.
For more example projects, take a look at
a previous
version of this course.
Info on Humanoids
Videos
Commentary
Other Humanoids Courses (mostly graduate) and Reseearch Groups
Hardware
Info on Robosapien RS Media robot
Course Poster, suitable for framing.
{kind=link}