Pipeline
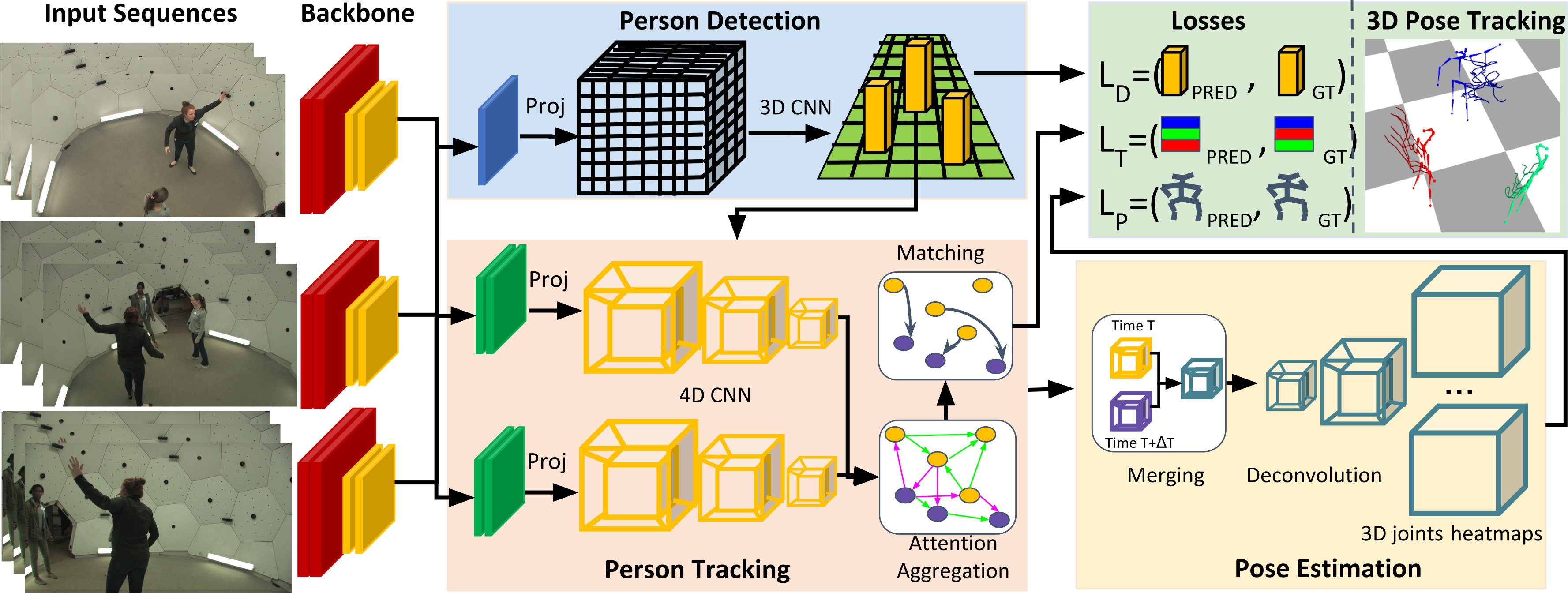
The complete pipeline of tessetrack has been illustrated. Initially, the video feed from multiple cameras is passed through shared HRNet to compute the features required for detection and 3D pose tracking. The final layer of the HRNet is passed through a 3D convolution to regress to the center of the human 3D bounding boxes. Each of the hypotheses is combined with the HRNet final layer to create a spatio-temporal Tube called tesseract. We use a learnable 3D tracking framework for a person association over time using spatio-temporal person descriptors. Finally, the associated descriptors are passed through deconvolution layers to infer the 3D pose. Note that the framework is end-to-end trainable except for the NMS layer in the detection network.