
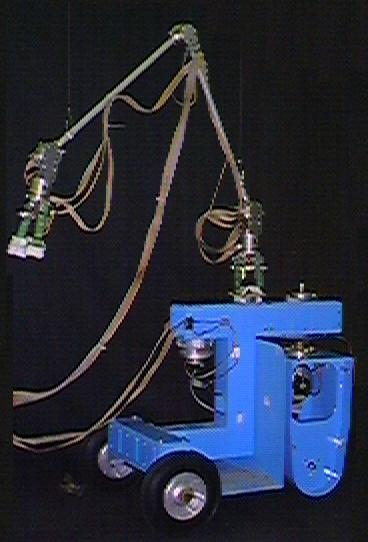
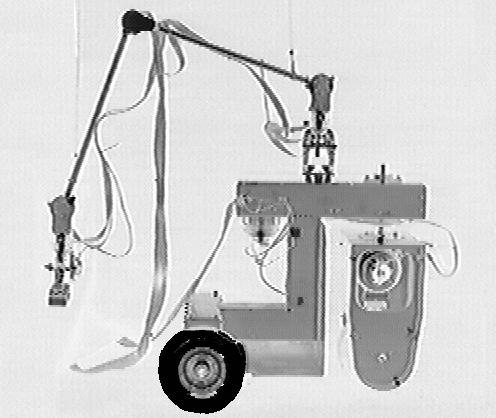
The Dual-use Mobile Detachable Manipulator, or (DM)2, is a robot designed for performing dual functions in a lunar-base construction scenario. It is a mobile manipulator formed by the combination of a mobile base and a manipulator arm with a gripper at each of its two ends. The arm can grasp a handhold on the base with one gripper and perform manipulation with other gripper, or it can detach from the base and climb on a structure by successively reaching for a new handhold with one gripper while securing itself with the other gripper.
(DM)2 is designed to perform inspection and maintenance tasks on the lunar surface in the most flexible manner possible. Besides the modularity already inherent in the the independence of its arm and base, (DM)2 is also designed to function easily with a number of different arms, end-effectors, and other hardware. To support this hardware modularity and reconfigurability, the robot is controlled by Chimera, a real-time operating system developed at Carnegie Mellon University which is built especially for control of highly reconfigurable systems.
Because the lunar environment is so hostile, and because human labor there is so complicated and costly, robots will be more appropriate workers than humans for much of the various production, exploration, and maintenance tasks which will be necessary for establishing and maintaining a lunar base. Robots will be valuable agents for exploration and transportation, for measurement and surveying the base and lunar surface, for collecting and analyzing soil samples, and for transporting equipment and materials in support of the operation of material processing and other plants. They will also be needed for inspection of the processing equipment, assembling truss structures, and delivering materials and equipment. The use of robots in a lunar manufacturing plant can allow the plant to be operational when astronauts return to the earth, and will allow astronauts to more effectively utilize their time while on the moon.
Various research efforts have been directed towards using robots for lunar exploration, but few studies have been done for developing a robot that can perform both exploration and maintenance tasks. In order for a robot to perform these dual tasks, it must possess not only mobility and sensing capacity for global locomotion on the lunar surface, the plant surface, and the plant structures, but it must also be capable of manipulation functions for performing maintenance and sample-transportation tasks. These dual tasks require that the robot possesses dual capabilities -- mobility and manipulation.
(DM)2 will be able to climb on the lunar base structures and traverse the lunar surface, as well as perform manipulation tasks in both environments. The base is necessary for general lunar mobility, but the arm is detachable from the base because a mobile base is inconvenient for locomotion on plant structures. The robot's reconfigurability will allow for maximum flexibility and utility in performing many different functions in the lunar environment.
This is a list of current documents on (DM)2
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}