

|
|
|
|
HeartLander in the news: |
ConstructionThe current design is a crawling robot with two body sections (front and rear) that are each 5 mm tall, 8 mm wide, and 10 mm long. Locomotion is made possible by a wire transmission that runs through the tether to offboard motors. Suction is supplied through vacuum lines also in the tether. This design makes HeartLander small, lightweight, and disposable. 
InsertionHeartLander is inserted into the body through a skin incision directly below the sternum. This subxiphoid approach provides direct access to the heart without requiring deflation of the left lung. The surgeon then makes another incision in the pericardium (the sac that encloses the heart), and places the robot directly on the heart surface by hand. PrehensionHeartLander uses suction to adhere to the epicardial (outer) surface of the heart, a technique used by FDA-approved medical devices that stabilize the heart. The suction forces are applied from the bottoms the front and rear body sections of the crawler (see image). A safe vacuum pressure is supplied by an external pump through two vacuum lines running through the tether. The vacuum pressure is monitored and controlled by the computer. LocomotionThe inchworm-like locomotion of the crawling robot is generated by alternating the suction to the body sections, while changing the distance between between them. Suction is controlled by pressure sensors and electronic valves. The distance between the bodies is controlled by external linear actuators that push and pull the drive wires running through the tether. One cycle of the locomotion process is illustrated below, where the dark ring shows active suction (see videos). The computer coordinates the actions and timing of the locomotion, which are transparent to the surgeon. The angle of the front body can be adjusted in order to steer or adapt to the curvature of the heart (see videos). 

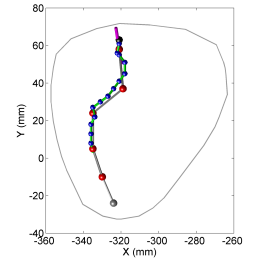
Feedback and TherapyLocomotion and therapy are controlled by the physician using a joystick and graphical interface that shows the exact location of the robot on the heart. The real time location is measured using a miniature magnetic tracking sensor (microBIRD, Ascension Technology) located on the front body of the crawling robot (see image). The robot can be driven using the joystick, or automatically walk to a specified target location on the heart (see video).
The crawling robot also contains a 2-mm working port through which
tools can be deployed for a variety of epicardial interventions. Thus
far, dye injections and epicardial pacing lead placement have been
performed percutaneously using HeartLander (see results). In the future, the front module will be equipped with modular end-effectors for more innovative therapeutic applications.
|