|
Green pixels are data from the current view. Red pixels are measured points from the previous 5 scans. That is, warp the world to the current view. Notice that there are cases that the stationary
2D scene assumption is violated, when the sensor underwent 3D motion, or
when there are moving cars in the scene.
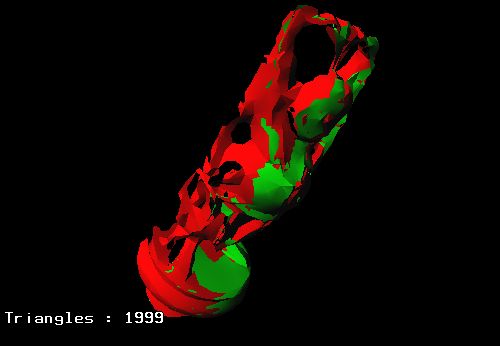
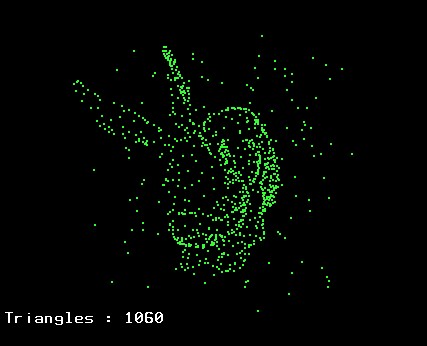
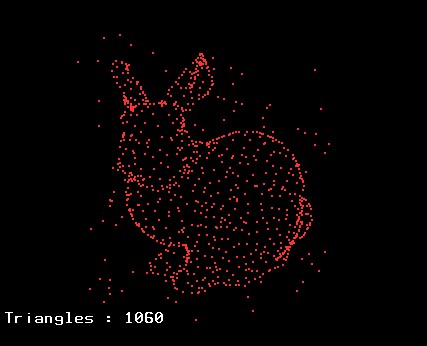
More 3D registration results: 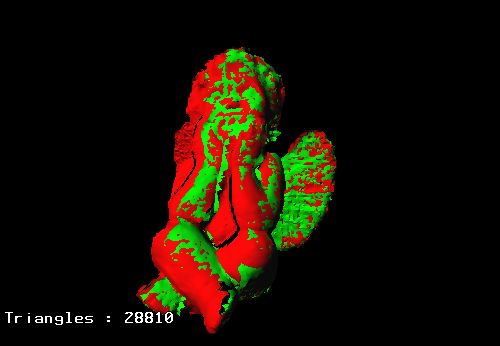
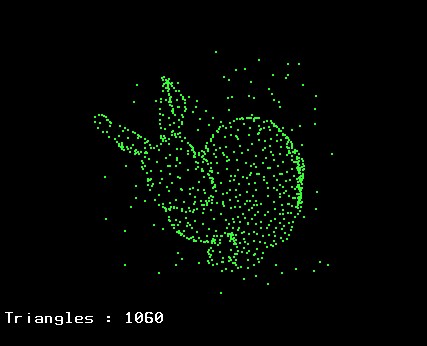
One example when the KC succeeded in the presence of uniformly distributed outlier, while ICP failed. Click on the images for VRML models.
|