
SMA Actuated Flexible Needle Control using EM Sensor Feedback for Prostate Brachytherapy
Brian Ruiz1, Parsaoran Hutapea2, Kurosh Darvish2, Adam Dicker3, Yan Yu3, and Tarun Podder1
1 Departments of Radiation Oncology and Physics, East Carolina University, Greenville, NC
2 Department of Mechanical Engineering, Temple University, Philadelphia, PA
3 Department of Radiation Oncology, Thomas Jefferson University, Philadelphia, PA
Abstract
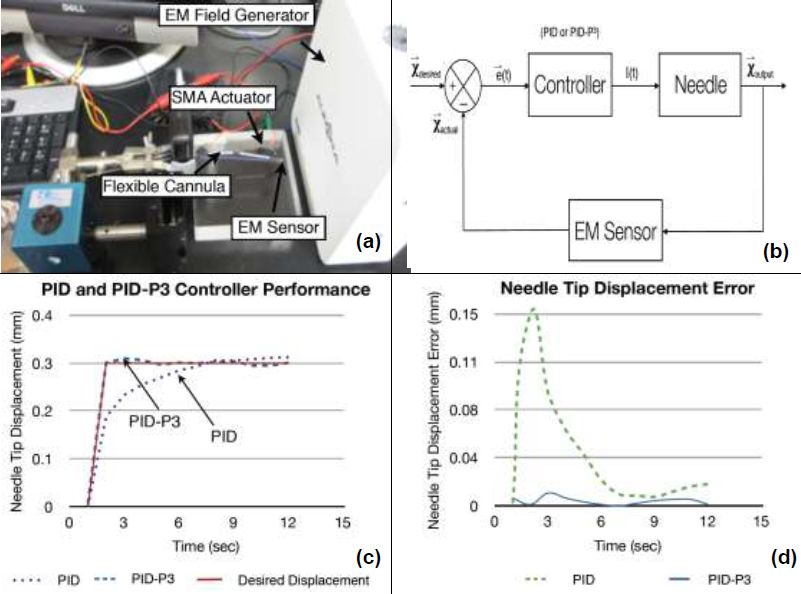
Both the low-dose-rate (LDR, ≤2 Gy/hr) and high-dose-rate (HDR, ≥12 Gy/hr) brachytherapies are clinically very effective modalities for treating prostate cancer. The LDR brachytherapy requires permanent implantation of radioactive seeds within the prostatic tissue to deliver a tumorocidal dose. Conventionally, implantation of radioactive seeds is performed using rigid needles in rectilinear approach. Guiding needles to target locations, especially in the peripheral zone of the prostate, geometrically conforming the prostate gland is a challenging task for the physicians. The HDR brachytherapy requires conformal and accurate placement of needles for creating passages for temporary dwelling of radioactive sources. Several robotic systems have been developed for brachytherapy, however, all these systems are using conventional needles. We are developing a Nitinol shape memory alloy (SMA) actuated robot-assisted needling system for prostate brachytherapy. An experimental needling system has been developed using flexible cannula of a 17-gauge HDR needle actuated by Nitinol SMA. Two closed-loop control algorithms, PID and PID-P3, have been implemented and their performances have been compared. Actual trajectory of the needle tip is tracked installing a 5- DOF Aurora® (NDI, Ontario, Canada) electromagnetic (EM) sensor at the tip of the needle. Preliminary results reveal that the SMA actuator may be adequate for creating required curvature for geometrically conforming the prostate gland. Performance of the PID-P3 controller appears superior to the PID controller. Further investigation of PID-P3 and other control algorithms such as neuro-fuzzy and adaptive are in progress. Real-time sensory feedback will be extended implementing ultrasound imaging modality.
Related Publications
-
T. K. Podder, A. P. Dicker, P. Hutapea, K.Darvish and Y. Yu, “A Novel Curvilinear Approach for Prostate Seed Implant”, in Medical Physics, Vol. 39, No. 4, pp. 1887-1892, 2012.
-
T. Podder, L. Beaulieu, B. Caldwell, R. Cormack, J. Crass, A. Dicker, A. Fenster, G. Fichtinger, M. Meltsner, M. Moerland, R. Nath, M. Rivard, T. Salcudean, D. Song, B. Thomadsen, and Y. Yu, “AAPM Guidelines for Image-Guided Robotic Brachytherapy: Progress Report From TG-192”, in AAPM 2011, Vancouver, BC.
-
T. Podder, L. Beaulieu, A. Dicker, M. Meltsner, M. Moerland, R. Nath, M. Rivard, D. Song, B. Thomadsen, and Y. Yu, “AAPM-ESTRO Guidelines for Image-Guided Robotic Brachytherapy: Report from Task Group 192”, in ASTRO 2012 (submitted).
-
T.K. Podder, D. P. Clark, E. M. Messing, D. J. Rubens, J. G. Strang, R. A. Brasacchio, L. Liao, W. S. Ng, and Y. Yu, “In vivo Motion and Force Measurement of Surgical Needle Intervention during Prostate Brachytherapy,” in the J. Medical Physics, Vol. 3, No. 8, pp. 2915-2922, 2006.
-
N. V. Datla, M. Honarvar, T. M. Nguyen, T.K. Podder, Y. Yu, A. P. Dicker, K. Darvish, P. Hutape A, “Thermomechanical Behavior of a Smart Actuator for an Active Surgical Needle,” in ASME Design of Medical Device Conference, Minneapolis, MN, April 10-12, 2012.
-
N. V. Datla, J. Koo, D. Choi, S. Assari, T. K. Podder, Y. Yu, A. P. Dicker, K. Darvish, P. Hutapea, “Mechanical Characterization of Prostate Tissue-Mimicking Phantoms for the Development of an Active Surgical Needle,” in ASME Design of Medical Device Conf., Minneapolis, MN, April 10-12, 2012.
-
P. Hutapea, T. K. Podder, K. Darvish, “Smart Needling System for Fully Conformal Radiation Dose Delivery in Treating Prostate Cancer,” in ASME Summer Bioengineering Conference, Farmington, Pennsylvania, June 22 – 25, 2011.
-
T. K. Podder, P. Hutapea, K. Darvish, A. Dicker, Y. Yu, “Smart needling system for fully conformal radiation dose delivery in treating prostate cancer,” in ASME 2010 Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS), Philadelphia, PA, September 28 – October 1, 2010.
-
T. K. Podder, I. Buzurovic, K. Huang, T. Showalter, A. P. Dicker, and Y. Yu, “Reliability of EUCLIDIAN: An automated image-guided robotic system for prostate brachytherapy,” in Medical Physics, Vol. 38, No. 1, pp 96-106, 2011.
-
K.Yan, T.K. Podder, L.Li, J.Joseph, D.Rubens, E.M.Messing, L. Liao, Y. Yu. “A real-time cancer detection technique using needle insertion forces and patient-specific criteria during percutaneous intervention,” in Med. Phys. Volume 36, Issue 7, pp. 3356-3362, 2009.
-
T.K. Podder, J. Sherman , D. Rubens , E. Messing , J. Strang , W. Ng , and Y. Yu, “Methods for prostate stabilization during transperineal LDR brachytherapy,” in the International Journal of Physics in Medicine and Biology, Vol. 53, pp. 1563-1579, 2008.
-
K. G. Yan, T.K. Podder, Y. Yu, T.I. Liu, C.W.S. Cheng, and W. S. Ng, “Flexible Needle-Tissue Interaction Modeling with Depth-varying Mean Parameter: Preliminary Study”, in the IEEE Transactions on Biomedical Engineering, Vol. 99, 2007.
-
K. G. Yan, T. K. Podder, D. Xiao, Y. Yu, T.I. Liu, C.W.S. Cheng, W. S. Ng, “An Improved Needle Steering Model with Online Parameter Estimator”, in the Int. J. of Computer Assisted Radiology and Surgery, 2006.
-
K. Yan, T. Podder, W.S. Ng, and Y. Yu, “Assessment of Major Parameters for Self-actuating Needle for Percutaneous Intervention,” in the International Conference on Medical Image Computing and Computer Assisted Intervention (MICCAI), New York, NY, Sept. 2008.
-
K. Yan, Y. Yu Yan, T.K. Podder, D. Xiao. I. Buzurovic, Y. Hu, and W.S. Ng, “Flexible Needle-tissue Interaction Modeling Using Depth-varying Mean Parameter,” in the Hong Kong Institution of Engineers (finalist for best paper award from HKIE), Sept. 2008.
-
K. Yan, T.K. Podder, W.S. Ng, and Y. Yu, “MBC Smart’ Needle for Percutaneous Surgery: Influential Factor Investigation”, in the Int. Conf. of IEEE Engr. in Med. and Biology Society, Lyon, France, pp. 461-464, 2007.
-
K. Yan, W.S. Ng, Y. Yu, and T.K. Podder, K.V. Ling, and T.I Liu, , “Needle Steering Modeling and Analysis using Unconstrained Modal Analysis,” in the Proceeding of the 1st IEEE Int. Conference on Biomedical Robotics and Biomechatronics, pp. 65-70, Pisa, Italy, 2006.
-
T.K. Podder, J. Sherman, D. Fuller, E.M. Messing, D.J. Rubens, J.G. Strang, R.A. Brasacchio, and Y. Yu, “Needle Insertion Force Estimation Model using Procedure-specific and Patient-specific Criteria,” in Proc. of Int. Conf. of IEEE Engr. in Medicine and Biology Society (EMBS/EMBC), New York, NY, pp. 555-558, 2006.
-
Kaiguo Yan, Tarun Podder, Yan Yu, Keck Voon Ling, Tien-I Liu, and Wan Sing Ng, “Online Parameter Estimation for Surgical Needle Steering Model,” in the Int. Conf. no Medical Image Computing and Computer Assisted Intervention (MICCAI), Copenhagen, Denmark , pp. 321-329, 2006.
-
T.K. Podder, D.P. Clark, D. Fuller, J. Sherman, W.S. Ng, L. Liao, D.J. Rubens, J.G. Strang, E.M. Messing, Y.D. Zhang, and Y. Yu, “Effects of Velocity Modulation during Surgical Needle Insertion,” in Proc. of the Int. Conf. of the IEEE Engr. in Medicine and Biology Society (EMBS), pp. 5766-5770, Shanghai, China, 2005.
-
T.K. Podder, E.M. Messing, D.J. Rubens, J.G. Strang, R.A. Brasacchio, D.P. Clark, D. Fuller, L. Liao, W.S. Ng, and Y. Yu, “Evaluation of Robotic Needle Insertion in Conjunction with in Vivo Manual Insertion in the Operating Room,” in the Proceedings of the 14th IEEE International Conf. on Robot and Human Interactive Communication (RO-MAN), pp. 356-362, Nashville, TN, USA 2005.
-
T.K. Podder, J. Sherman, D.P. Clark, D. Fuller, D.J. Rubens, E.M. Messing, J.G. Strang, L. Liao, W.S. Ng, and Y. Yu, “Method to Reduce Force and Target Movement during Surgical Needle Interventions,” in the IFMBE Proc. of the 3rd European Medical & Biological Engineering Conference, Vol. 11, pp. 4315-4320, Prague, Czech Republic, 2005.
Links