Predictable Behavior During Contact Simulation: A Comparison of Selected Physics Engines
People
Abstract
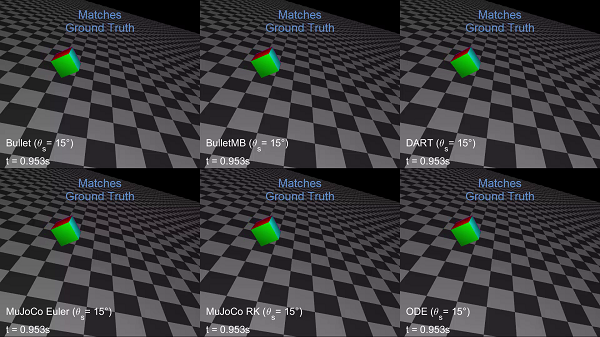
Contact behaviors in physics simulations are important for real-time interactive applications, especially in virtual reality applications where user's body parts are tracked and interact with the environment via contact. For these contact simulations, it is ideal to have small changes in initial condition yield predictable changes in the output. Predictable simulation is key for success in iterative learning processes as well, such as learning controllers for manipulations or locomotion tasks. Here, we present an extensive comparison of contact simulations using Bullet Physics, DART, MuJoCo, and Open Dynamics Engine, with a focus on predictability of behavior. We first tune each engine to match an analytical solution as closely as possible, then compare the results for a more complex simulation. We found that in the commonly available physics engines, small changes in initial condition can sometimes induce different sequences of contact events to occur and ultimately lead to a vastly different result. Our results confirmed that parameter settings do matter a great deal and suggest that there may be a trade-off between accuracy and predictability.
Additional links
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author's copyright. These works may not be reposted without the explicit permission of the copyright holder.
|
|
Comments, questions to Se-Joon Chung. We support web standards; this page is valid XHTML 1.0 Transitional and CSS.