

|
|
|

|

|
||
| Occupancy map. The location of obstacles is shown in dark, whereas Free space is white. Minerva learns this using two laser range finders, which are sensors for measuring proximity. | Ceiling mosaic. Minerva learns a mosaic of the museum's ceiling, by integrating images taken by a vertically mounted camera. | ||
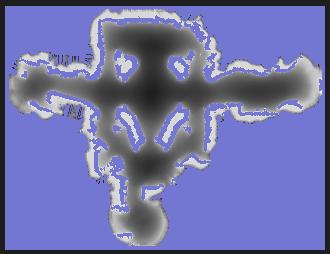
Maps Computed by Minerva |
|||
 |
|||
| The above two maps were computed by Minerva from the occupancy map and ceiling mosaic. Each map shows the localization information available at each point, using the laser sensor in the left map, and the ceiling camera in the right map. The darker a point is, the more likely Minerva could get lost at that point. | |||

|