Centralized planning of two circular holonomic robots
Conservative setting of minimum success probability to 0.99 yields path
length of 3.53. Both robots take long path around obstacles:
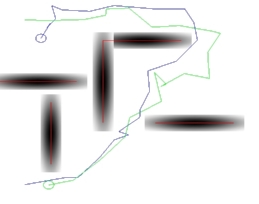
Animated Path
Relaxing minimum success probability to 0.54 yields path length of 2.79.
Planner can send one robot through the risky narrow passage, but the other
takes the long route so the overall probability of collision does not exceed
the limit:

Animated Path
Finally, setting of minimum success probability to 0.13 yields path length
of only 1.53. Both robots take the risky passage between obstacles:

Animated Path