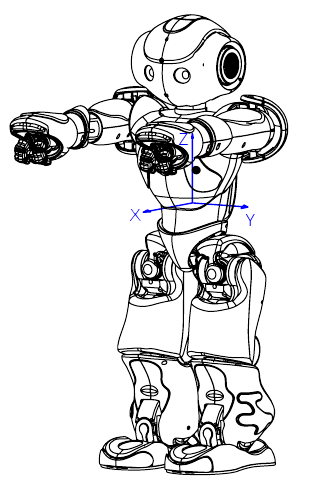
Links V3.2
Motors & Kinematics | Links V3.2 | Joints V3.2 | Masses V3.2

| Name |
X (mm) |
Y (mm) |
Z (mm) |
| Torso to HeadYaw |
0.00 |
0.00 |
126.50 |
| HeadYaw to HeadPitch |
0.00 |
0.00 |
0.00 |
| Torso to LShoulderPitch |
0.00 |
98.00 |
100.00 |
| LShoulderPitch to LShoulderRoll |
0.00 |
0.00 |
0.00 |
| LShoulderRoll to LElbowYaw |
90.00 |
0.00 |
0.00 |
| LElbowYaw to LElbowRoll |
0.00 |
0.00 |
0.00 |
| LElbowRoll to LWristYaw |
50.55 |
0.00 |
0.00 |
| Torso to LHipYawPitch |
0.00 |
50.00 |
-85.00 |
| LHipYawPitch to LHipRoll |
0.00 |
0.00 |
0.00 |
| LHipRoll to LHipPitch |
0.00 |
0.00 |
0.00 |
| LHipPitch to LKneePitch |
0.00 |
0.00 |
-100.00 |
| LKneePitch to LAnklePitch |
0.00 |
0.00 |
-102.75 |
| LAnklePitch to LAnkleRoll |
0.00 |
0.00 |
0.00 |
| Name |
Length (mm) |
|---|
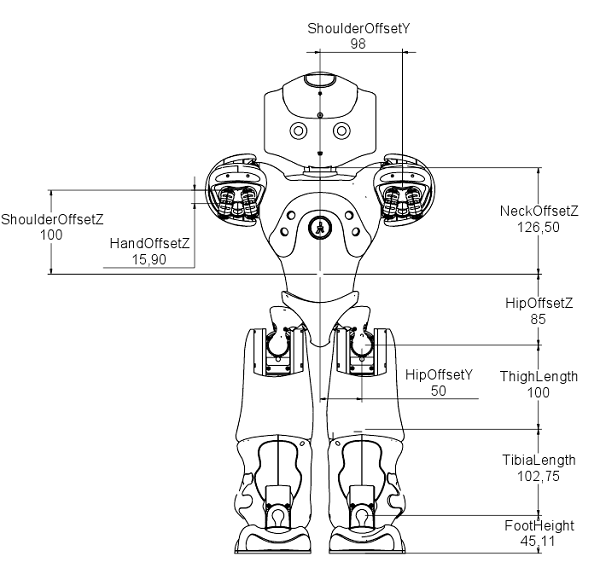
| NeckOffsetZ |
126.50 |
| ShoulderOffsetY |
98.00 |
| UpperArmLength |
90.00 |
| LowerArmLength |
50.55 |
| ShoulderOffsetZ |
100.00 |
| HandOffsetX |
58.00 |
| HipOffsetZ |
85.00 |
| HipOffsetY |
50.00 |
| ThighLength |
100.00 |
| TibiaLength |
102.74 |
| FootHeight |
45.11 |
| HandOffsetZ |
15.90 |