The Working Principle
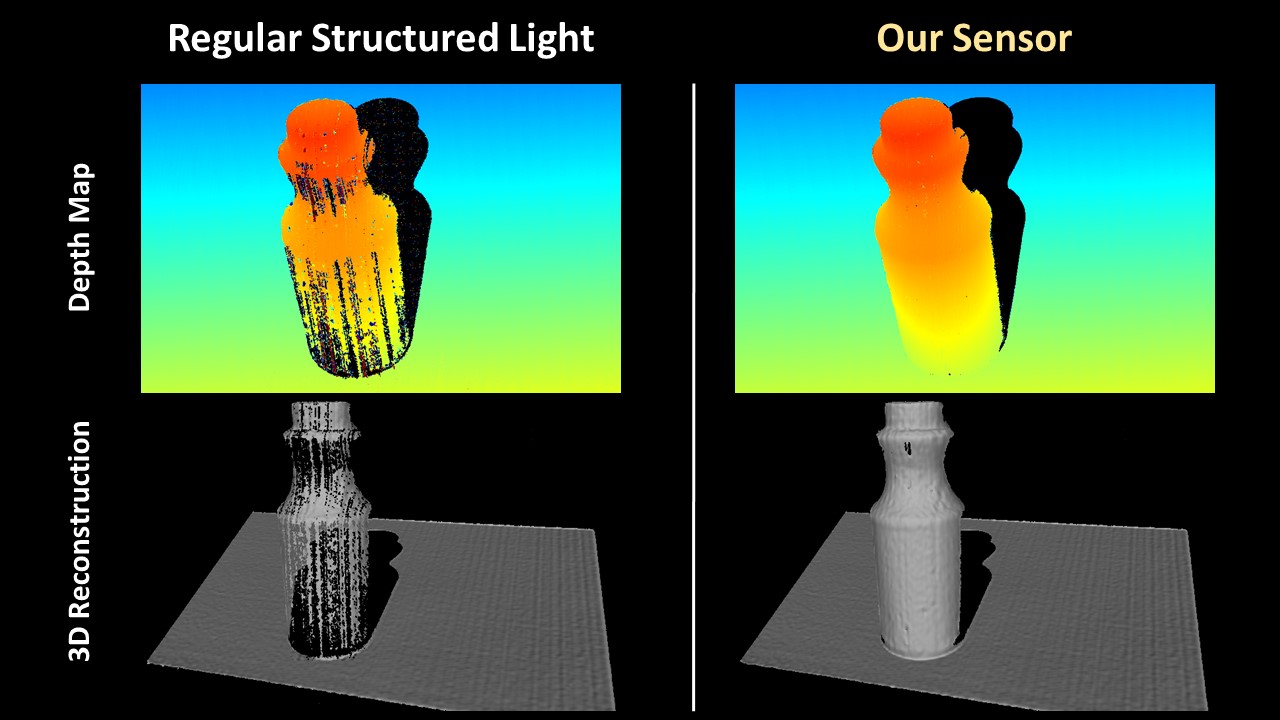
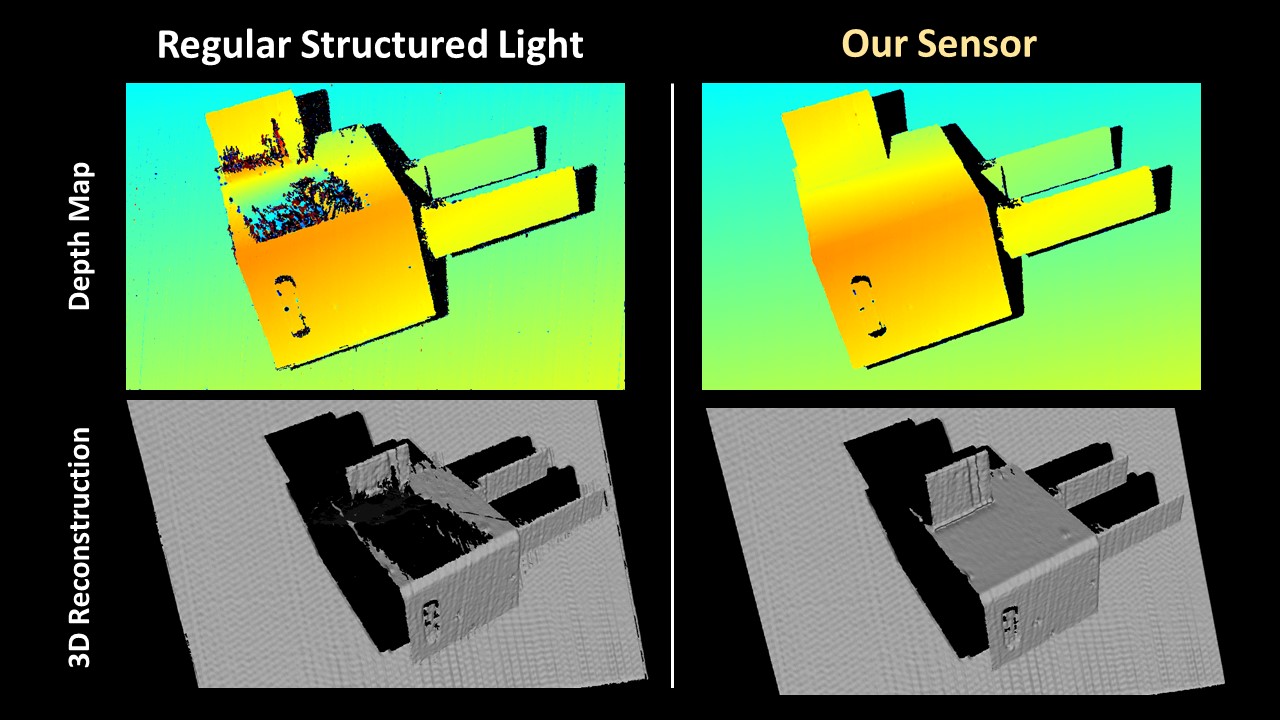
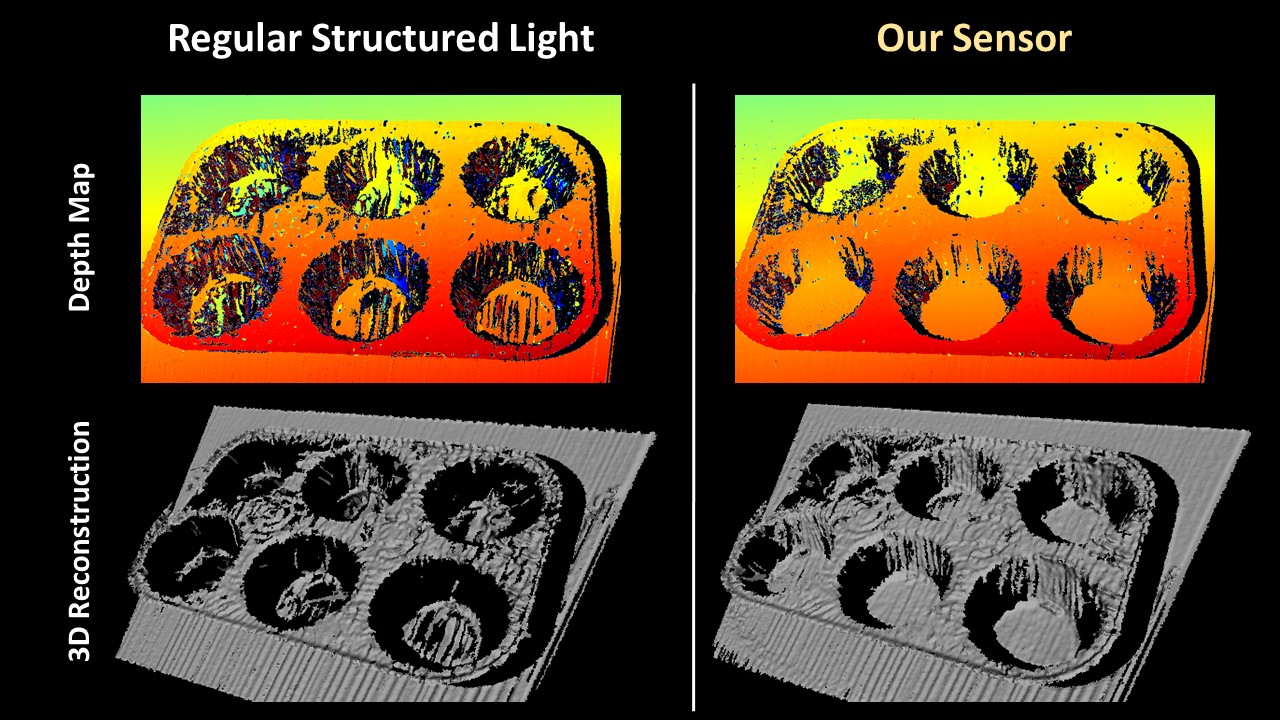
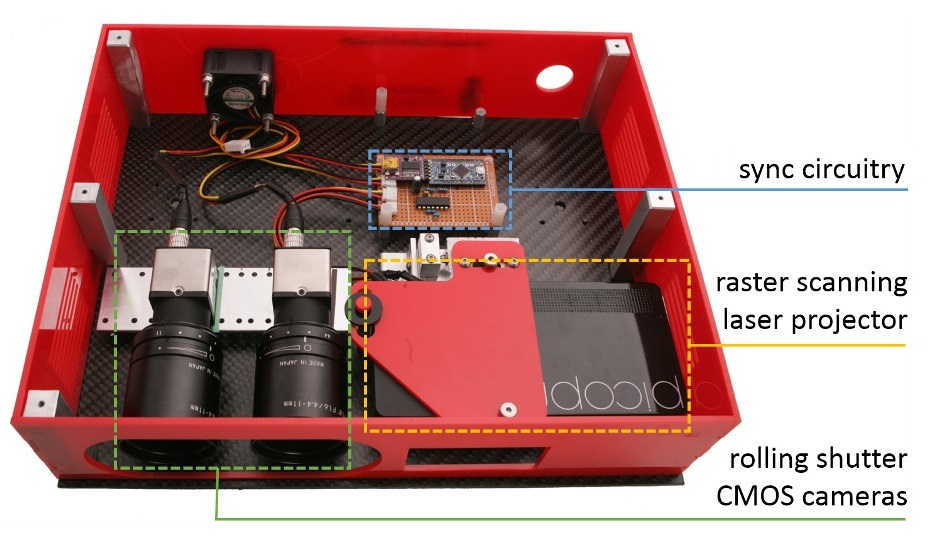
The Episcan3D sensor's raster scanning projector illuminates the scene one scanline at a time. The cameras and projector are aligned so that by epipolar geometry, one projector scanline corresponds to a single row of pixels in each camera. The rolling shutter on the cameras are synchronized so that the exposed row moves in lockstep with the active projector scanline.
The projector takes only 20 microseconds to draw a scanline, so the exposure for each camera row is also very short. This short exposure integrates very little ambient light while still collecting all the light from the projector. Only light paths that follow the epipolar constraint between the projector to camera reach the camera sensor, this blocks almost all multipath light.



 Supreeth Achar
Supreeth Achar
 Matthew O'Toole
Matthew O'Toole
 Srinivasa Narasimhan
Srinivasa Narasimhan Kyros Kutulakos
Kyros Kutulakos