Lecture 16
24-354 General Robotics
Fall-03. Prof. Howie Choset
Denavit Hartenberg Notes:
- Assigning coordinate systems:
- Assign Zi along the axis of joint i.
- For a revolute joint, the joint axis is along the axis of rotation.
- For a prismatic joint, the joint axis is along the axis of translation.
- Choose Xi to point along the common perpendicular of Zi and Zi+1 pointing towards the next joint.
- if Zi and Zi+1 intersect, then choose Xi to be normal to the plane of intersection.
- Choose Yi to round out a right hand coordinate system.
- The Y-axis is not used for Denavit Hartenberg so it is usually not drawn in the interest of less clutter.
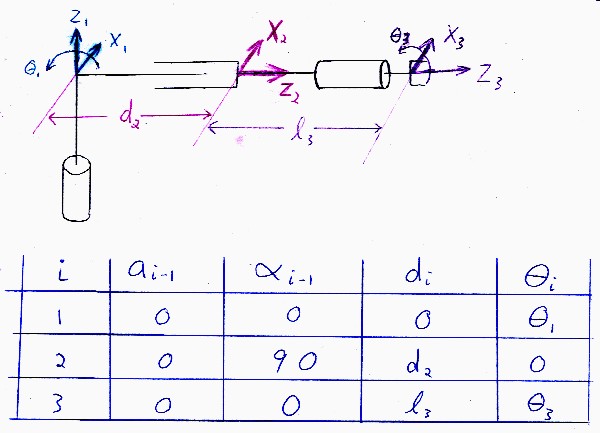
- DH parameters
- ai-1: distance from Zi-1 to Zi along Xi-1
-
 : angle from Zi-1 to Zi about Xi-1
: angle from Zi-1 to Zi about Xi-1
- di: distance from Xi-1 to Xi along Zi
-
 : angle from Xi-1 to Xi about Zi
: angle from Xi-1 to Xi about Zi
Transformation Matrix from DH parameters:
 Denavit Hartenberg examples:
Denavit Hartenberg examples:
- Example 1: Rotation CCW is pos, Rotation Clockwise with X into the paper is Rotation CCW, joint variables about Z axis
- Example 2: Wrist has 3 DOF that meet at a common origin
