
Lab
staff:
Introduction:
This final lab will challenge students to construct a robot capable of
discerning between two objects by their shapes and then moving the objects from
their starting points to a proper goal location. Robots will compete
head-to-head to finish as many objectives as possible in the shortest amount of
time.
Challenge Statement:
In this lab, you will construct a mobile robot that
can maneuver around a 4' square arena populated with three uniquely-shaped
targets ("I" targets and "O" targets), two target goals, and one other robot.
The arena is black and enclosed by 4-6 inch high walls. Your robot can score points by carrying the correctly-shaped target to the
corresponding goal. The opposing robot will also be attempting to acquire the
targets and can move to interfere with your robot's maneuvering. At the end of
five minutes, points will be awarded for the number of targets a robot
successfully collected; the team with the highest total number of points will
win the competition.
More Details:
The robots will be competing on a 4' square playing field
as shown below. In the picture, thin solid lines correspond to white electrical
tape markers.

The robots must fit within one of two 10" by 10" starting locations, labeled
R1 and R2 in the diagram. At the locations labeled "R1 target" and "R2 target",
one of two randomly and independently chosen target shapes will be positioned.
These targets are identified as the "I" target and the "O" target, corresponding
to their shapes. Images of the targets are shown below:


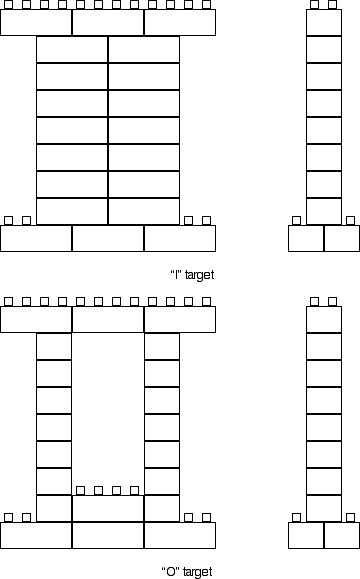 The dimensions of
the targets are as follows:
The dimensions of
the targets are as follows:
| Height: |
9 bricks |
| Width: |
12 pegs |
| Depth: |
4 pegs (bottom), 2 pegs (top) |
| Center post width: |
8 pegs |
| Center post height: |
7 bricks |
| Hole height (O target): |
5 bricks |
| Hole width (O target): |
4 pegs |
The target shapes are aligned so the widest
face faces the robot start points. Additionally, there is a center
target&emdash;either an I or an O&emdash; that is positioned in the
middle of the arena, aligned so that its widest face faces the goal corners. To
score a point, a robot must determine what type of target is in front of it,
grip the target, and move the target into the correct goal point. All I targets
must be taken to the top-left goal, while all O targets must be taken to the
bottom-right goal. Robots can score additional points by acquiring and properly
positioning the center target as well, using the method described. Robots will
be given a maximum of 5 minutes to complete all tasks.
Competition:
On the day of the competition, Teams will be organized into
groups of three on the day of the competition. Each team will play twice--once
against one group member, and once against the other group member. Competition
score will be the sum of the scores from the two runs. Competition score will be
granted as follows:
| Event |
Score (points) |
| Robot puts correct target in goal: |
5 |
| Robot's target is in goal at the end of game time: |
10 |
| Robot touches center target: |
5 |
| Robot places center target in correct goal: |
5 |
| Robot is within center square at end of game time: |
5 |
For scoring purposes, being "within" a region is
defined as having any part of the target (or any part of the robot that is
attached to the Handyboard) contact the ground within the boundary of the region
in question. The exception to this rule is the 10" size constraint at the start
of the competition; no part of the robot may break the vertical planes described
by the boundaries of the 10" starting box.
Evaluation:
Grading will be done independently of the competition, and
will be assigned as follows:
| Event |
Grade (points) |
| Robot touches its target |
+20 |
| Robot identifies target correctly (by displaying I or O on the
Handyboard display screen) |
+30 |
| Robot puts target in any corner goal |
+5 |
Robot puts target in the correct goal |
+25 |
| Robot gets to middle equare |
+10 |
| Robot touches middle target |
+10 |
| Robot places middle target in correct goal |
+10 |
Opponent interaction:
Since this is a head-to-head competition, robots
are allowed to interfere with the maneuvering of other robots. In particular, a
robot may block another robot by interposing itself in the robot's path. A robot
may also push another robot directly in an attempt to change its path of travel.
Finally, a robot may remove another robot's shapes from the goal, depriving it
of the bonus for having its shape safely in the goal at the end of five minutes.
NOTE:Under no circumstances does interference by the opponent alter a
team's grade for the lab. If it is determined by the TAs that a robot's
performance was grossly altered by interference from its opponent, the TA may,
at his or her discretion, run the interfered robot alone on a field lacking an
opponent to determine the team's grade for the project. While competition is
allowed, malicious interference will not be tolerated. In particular, the
following strategies are strictly forbidden:
- Intentionally designing a robot to damange or disassemble other robots
- Unintentionally designing a robot that, in practice, seems hell-bent on
damanging or disassembling other robots
- Any design that includes a component specifically designed to impale other
robots
- Any strategy involving interference with the nominal operation of an
opponent's Handyboard, be the interference electrical, magnetic, or physical
- Any strategy involving damaging, disassembling, re-assembling, or changing
the chemical properties of the playing field or the markers
Violating these guidelines will result in the
immediate disqualification of the offending team from the
competition.
It should be noted that while malicious contact is disallowed, other contact
is encouraged. Teams should design their robots with care, factoring in
the possibility of contact with other machines. In particular, while previous
designs may have given little care to the position of wires in the design, teams
may want to take extra precautions to protect their wires, Handyboard, and core
components from casual contact with opponents.
Startup procedure:
To ensure that the robots are sensing targets
independently of human influence, the TAs will be responsible for activating the
robots during the competition. To facilitate this process, plese adhere to the
following guidelines regarding the comptetition-day startup procedure.
- Teams will position and orient their robots within the initial starting
space
- Teams will give clear written directions to the TAs regarding the proper
procedure for starting the robot. These directions may include optional
procedures for starting the robot in the R1 location or the R2 location
- TAs will use a randomized method (coin-flipping) to determine the type of
targets&emdash;I or O&emdash; that will be placed at target locations
R1, R2, and center
- As per the written instructions, TAs will simultaneously start the robots
Design Constraints:
(PRINT THESE OUT!)
- Robot must begin inside a 10" wide by 10" long box.
- Additional parts may be purchased, but the a $50 spending limit is imposed
- Robot must either have the Handyboard display attached to display I or O
when a target is identifed, or the team must provide special instructions
delineating how their robot exclusively specifies I or O
- Teams must be ready to provide written directions on how the robot is
activated
Important Dates:
Competition day: Wednesday, December 7th.
PPT Presentation