16-281 General Robotics
16-281 General Robotics|
16-281 General Robotics |
|||
| Main Schedule Homework Labs Links |
16-281 Homework 2 |
|||||
Learning Objectives
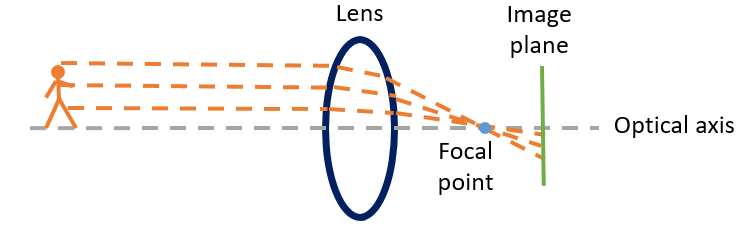
BackgroundConvolutionConvolution is a broad term that refers to an operation that is comprised of two functions. This operation is used in applications from signal processing to image manipulation. It is usually denoted with an asterisk and can be mathematically defined as the integral product of one function times another function that is reversed and shifted. For this class, we use it to describe the element-wise repeated multiplication of an initial image and mask (or kernel). This page provides a mathematical explaination and a few examples. Depth from ImageUsing known information about a camera and simplifying assumptions about the environment, one can determine how far away an object is using similar triangles. The image below shows how light travels through a simplified convex lens.
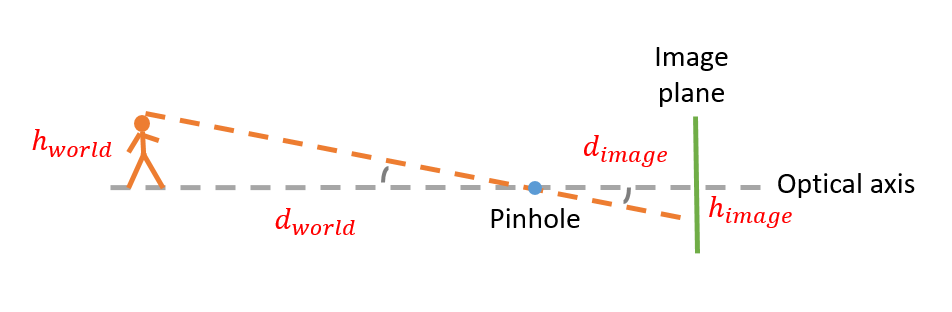
For this class, it is sufficient to use the pinhole approximation of a camera:
From this image, you can form similar triangles and see that the proportion of h_world to d_world is the same as the proportion of h_image to d_image. Neural NetsA neural net is a series of weightings. An input (image, text, number, etc.) is represented as a value or set of values, which are multiplied by the neural net's weightings to produce an output value. For a classification task, these output values are then mapped to categories. In order to determine the weightings in the neural net, the system must "learn" the best values based on sample data with known classifications. During the training phase, these weightings are adjusted based on the training data. The testing phase just involves running new data that was not used for training through the system and comparing the output classifications to their known classifications. Homework RequirementsThe specifications for Homework are presented in the following document. ExtensionsThis site provides a nice introduction to ray tracing including concave lenses, which we will not discuss in this course (linked with permission). |
|||||
|
Last updated 1/10/2026 by Jack Hurewitz (c) 1999-2026: Howie Choset, Carnegie Mellon |