Final
24-354 General Robotics
Fall-02. Prof. Howie Choset
· You have 1 hour and 30 minutes to complete the exam.
· Please write all answers either on the exam or in a blue book
· You must attempt all five problems
· Good Luck
Problem #1 (25 points)
(a.) (10 points) For the following configuration
space, draw a trapezoidal decomposition and a Boustrophedon decomposition.
(b.) (10 points) For each method, superimpose the
adjacency graph on your drawing.
(c.) (5 points) If you were to use the decomposition
to determine a coverage path, comment on the significant features of each path
and explain why they are different.

Trapeziodal

Boustrophedon
Spare for work
Problem #2 (25 points)
(a.) (15 points) Given the following workspace (with robot shown at start configuration) and configuration space, use the Wavefront planner with the L2 metric to find a path in configuration space from the start configuration to the goal configuration, subject to Ө1 having joint limits of 0<Ө1<359.9 and Ө2 having no joint limits. Draw the path on the figure. Note: Ө1 is the first joint angle, and Ө2 is the second joint angle.
(b.) (10 points) Draw five intermediate configurations between the start and goal configurations, and show their location in the configuration space.

Problem #3 (20 points)
For the two link, prismatic-revolute manipulator shown below, assign coordinate frames and derive the Denavit Hartenberg parameters.

Problem #4 (5 points)
Robotics can be broken down into various classes of sub-categories. Pick three sub-categories that together encompass the robotics field and define them.
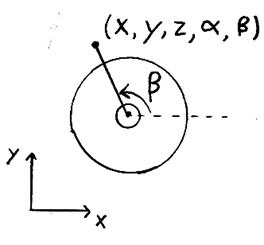
Problem #5 (25 points)
(a.)(20 points) We’ve taken the manipulator of problem 3, rotated it, and affixed it to a planar, 3-DOF mobile base (xb,yb,Өb). Given an arbitrary position and orientation x, y, z, α, and β, derive the inverse kinematics to solve for the required xb, yb, Өb, d1, and Ө2 to achieve the given position and orientation.

Top View Front View
(b.)(5 points) What is the configuration space of this 5-DOF robot.