
Ghostbusters
I can hear you, ghost.
Running won't save you from my
Particle filter!
Introduction
Pacman spends his life running from ghosts, but things were not always so. Legend has it that many years ago, Pacman's great grandfather Grandpac learned to hunt ghosts for sport. However, he was blinded by his power and could only track ghosts by their banging and clanging.
In this project, you will design Pacman agents that use sensors to locate and eat invisible ghosts. You'll advance from locating single, stationary ghosts to hunting packs of multiple moving ghosts with ruthless efficiency.
Whenever Pacman captures a ghost, the ghost is sent to it's jail location. Throughout this project, we refer to the jail location as the ghost's jail position.
The code for this project contains the following files, available as a zip archive.
Files you will edit
bustersAgents.py |
Agents for playing the Ghostbusters variant of Pacman. |
inference.py |
Code for tracking ghosts over time using their sounds. |
Files you will not edit
busters.py |
The main entry to Ghostbusters (replacing Pacman.py) |
bustersGhostAgents.py |
New ghost agents for Ghostbusters |
distanceCalculator.py |
Computes maze distances |
game.py |
Inner workings and helper classes for Pacman |
ghostAgents.py |
Agents to control ghosts |
graphicsDisplay.py |
Graphics for Pacman |
graphicsUtils.py |
Support for Pacman graphics |
keyboardAgents.py |
Keyboard interfaces to control Pacman |
layout.py |
Code for reading layout files and storing their contents |
util.py |
Utility functions |
Files to Edit and Submit: You will fill in portions of bustersAgents.py and inference.py during the assignment. You should submit these files with your code and comments. Please do not change the other files in this distribution or submit any of our original files other than these files.
Evaluation: Your code will be autograded for technical correctness. Please do not change the names of any provided functions or classes within the code, or you will wreak havoc on the autograder. However, the correctness of your implementation -- not the autograder's judgements -- will be the final judge of your score. If necessary, we will review and grade assignments individually to ensure that you receive due credit for your work.
Academic Dishonesty: We will be checking your code against other submissions in the class for logical redundancy. If you copy someone else's code and submit it with minor changes, we will know. These cheat detectors are quite hard to fool, so please don't try. We trust you all to submit your own work only; please don't let us down. If you do, we will pursue the strongest consequences available to us.
Getting Help: You are not alone! If you find yourself stuck on something, contact the course staff for help. Office hours, recitation, and Piazza are there for your support; please use them. If you can't make our office hours, let us know and we will schedule more. We want these projects to be rewarding and instructional, not frustrating and demoralizing. But, we don't know when or how to help unless you ask.
Discussion: Please be careful not to post spoilers.
Ghostbusters and Bayes' Nets
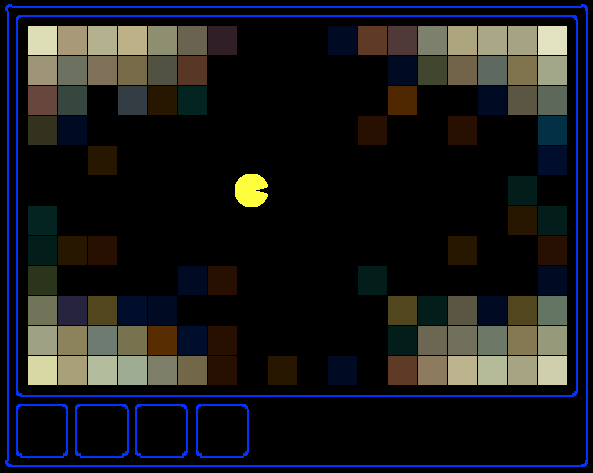
In this version of Ghostbusters, the goal is to hunt down scared but invisible ghosts. Pacman, ever resourceful, is equipped with sonar (ears) that provides noisy readings of the Manhattan distance to each ghost. The game ends when Pacman has eaten all the ghosts. To start, try playing a game yourself using the keyboard.
python3.6 busters.py
The blocks of color indicate where the each ghost could possibly be, given the noisy distance readings provided to Pacman. The noisy distances at the bottom of the display are always non-negative, and always within 7 of the true distance. The probability of a distance reading decreases exponentially with its difference from the true distance.
Your primary task in this project is to implement inference to track the ghosts. For the keyboard based game above, a crude form of inference was implemented for you by default: all squares in which a ghost could possibly be are shaded by the color of the ghost. Naturally, we want a better estimate of the ghost's position. Fortunately, Bayes' Nets provide us with powerful tools for making the most of the information we have. Throughout the rest of this project, you will implement algorithms for performing both exact and approximate inference using Bayes' Nets. The project is challenging, so we do encourage you to start early and seek help when necessary.
While watching and debugging your code with the autograder, it will be helpful to have some understanding of what the autograder is doing. There are 2 types of tests in this project, as differentiated by their *.test files found in the subdirectories of the test_cases folder. For tests of class DoubleInferenceAgentTest, your will see visualizations of the inference distributions generated by your code, but all Pacman actions will be preselected according to the actions of the staff implementation. This is necessary in order to allow comparision of your distributions with the staff's distributions. The second type of test is GameScoreTest, in which your BustersAgent will actually select actions for Pacman and you will watch your Pacman play and win games.
As you implement and debug your code, you may find it useful to run a single test at a time. In order to do this you will need to use the -t flag with the autograder. For example if you only want to run the first test of question 1, use:
python3.6 autograder.py -t test_cases/q1/1-ObsProb
Question 0 (0 points): DiscreteDistribution Class
Throughout this project, we will be using the DiscreteDistribution class defined in inference.py to model belief distributions and weight distributions. This class is an extension of the built-in Python dictionary class, where the keys are the different discrete elements of our distribution, and the corresponding values are proportional to the belief or weight that the distribution assigns that element. This question asks you to fill in the missing parts of this class, which will be crucial for later questions (even though this question itself is worth no points).
First, fill in the normalize method, which normalizes the values in the distribution to sum to one, but keeps the proportions of the values the same. Use the total method to find the sum of the values in the distribution. For an empty distribution or a distribution where all of the values are zero, do nothing. Note that this method modifies the distribution directly, rather than returning a new distribution.
Second, fill in the sample method, which draws a sample from the distribution, where the probability that a key is sampled is proportional to its corresponding value. Assume that the distribution is not empty, and not all of the values are zero. Note that the distribution does not necessarily have to be normalized prior to calling this method. You may find Python's built-in random.random() function useful for this question.
Reminder: The DiscreteDistribution class is an extention of the built-in Python dictionary class. You can access the keys of the underlying dictionary using self.keys(). You can access an item in the dictionary using dict[key].
There are no autograder tests for this question, but the correctness of your implementation can be easily checked. We have provided Python doctests as a starting point, and you can feel free to add more and implement other tests of your own. You can run the doctests using:
python3.6 -m doctest -v inference.py
Note that, depending on the implementation details of the sample method, some correct implementations may not pass the doctests that are provided. To thoroughly check the correctness of your sample method, you should instead draw many samples and see if the frequency of each key converges to be proportional of its corresponding value.
Question 1 (2 points): Observation Probability
In this question, you will implement the getObservationProb method in the InferenceModule base class in inference.py. This method takes in an observation (which is a noisy reading of the distance to the ghost), Pacman's position, the ghost's position, and the position of the ghost's jail (when a ghost is captured by Pacman, the ghost's position will be the same as it's jail position). The getObservationProb method should return the probability of the noisy distance reading given Pacman's position and the ghost's position. In other words, we want to return P(noisyDistance | pacmanPosition, ghostPosition).
The distance sensor has a probability distribution over distance readings given the true distance from Pacman to the ghost. This distribution is modeled by the function busters.getObservationProbability(noisyDistance, trueDistance), which returns P(noisyDistance | trueDistance) and is provided for you. You should use this function to help you solve the problem, and use the provided manhattanDistance function to find the distance between Pacman's location and the ghost's location.
However, there is the special case of jail that we have to handle as well. Specifically, when we capture a ghost and send it to the jail location, our distance sensor deterministically returns None, and nothing else. So, if the ghost's position is the jail position, then the probability of the noisy distance observation being None should be 1, and the probability of it being anything else should be 0. Conversely, if the ghost is not in jail, then probability of a noisy distance observation being None should be zero.
To test your code and run the autograder for this question:
python3.6 autograder.py -q q1
As a general note, it is possible for some of the autograder tests to take a long time to run for this project, and you will have to exercise patience. As long as the autograder doesn't time out, you should be fine (provided that you actually pass the tests).
Question 2 (3 points): Exact Inference Update
In this question, you will implement the update method in ExactInference class of inference.py to correctly update the agent's belief distribution over ghost positions given an observation from Pacman's sensors. The update method does not return anything. It implements the update step of the forward algorithm, but not the predict step. Recall that the update step is the first step of the forward algorithm, also called the filtering algorithm. The update step should, for this problem, update the belief at every position on the map after receiving a sensor reading. Beliefs represent the probability that the ghost is at a particular location, and are stored as a DiscreteDistribution object in a field called self.beliefs, which you should update.
Before typing any code, write down the equation of the inference problem you are trying to solve. As you update the agent's belief distribution, remember to multiply the beliefs by P(noisyDistance | pacmanPosition, ghostPosition). You should use the function self.getObservationProb that you wrote in the last question, which returns the probability of an observation given Pacman's position, a potential ghost position, and the jail position. You can obtain Pacman's position using gameState.getPacmanPosition(), and the jail position using self.getJailPosition().
In the Pacman display, high posterior beliefs are represented by bright colors, while low beliefs are represented by dim colors. You should start with a large cloud of belief that shrinks over time as more evidence accumulates. As you watch the test cases, be sure that you understand how the squares converge to their final coloring. In test cases where is Pacman boxed in (which is to say, he is unable to change his observation point), why does Pacman sometimes have trouble finding the exact location of the ghost?
Note: Make sure to normalize your beliefs such that they maintain proper probability distributions.
Note: your busters agents have a separate inference module for each ghost they are tracking. That's why if you print an observation inside the update function, you'll only see a single number even though there may be multiple ghosts on the board.
Note: self.allPositions is a list of the possible ghost positions, including the ghost's jail position. You should only consider positions that are in
self.allPositions.
To run the autograder for this question and visualize the output:
python3.6 autograder.py -q q2
If you want to run this test (or any of the other tests) without graphics you can add the following flag:
python3.6 autograder.py -q q2 --no-graphics
*IMPORTANT*: In general, it is possible sometimes for the autograder to time out if running the tests with graphics. To accurately determine whether or not your code is efficient enough, you should run the tests with the --no-graphics flag. If the autograder passes with this flag, then you will receive full points, even if the autograder times out with graphics.
Question 3 (3 points): Exact Inference Predict
In the previous question you implemented belief updates for Pacman based on his observations. Fortunately, Pacman's observations are not his only source of knowledge about where a ghost may be. Pacman also has knowledge about the ways that a ghost may move; namely that the ghost can not move through a wall or more than one space in one time step.
In this question, you will implement the predict method in ExactInference. Recall that the predict step is the second step of the forward algorithm, also called the filtering algorithm. The predict step should, for this problem, update the belief at every position on the map after one time step elapsing. Your agent has access to the action distribution for the ghost through self.getPositionDistribution. In order to obtain the distribution over new positions for the ghost, given its previous position, use this line of code:
newPosDist = self.getPositionDistribution(gameState, oldPos)
Where oldPos refers to the previous ghost position. Note that oldPos does not exist in the starter code and should be set by you.
newPosDist is a DiscreteDistribution object, where for each position p in self.allPositions, newPosDist[p] is the probability that the ghost is at position p at time t + 1, given that the ghost is at position oldPos at time t. Note that this call can be fairly expensive, so if your code is timing out, one thing to think about is whether or not you can reduce the number of calls to self.getPositionDistribution.
Before typing any code, write down the equation of the inference problem you are trying to solve. In order to test your predict implementation separately from your update implementation in the previous question, this question will not make use of your update implementation.
Since Pacman is not observing the ghost, this means the ghost's actions will not impact Pacman's beliefs. Over time, Pacman's beliefs will come to reflect places on the board where he believes ghosts are most likely to be given the geometry of the board and what Pacman already knows about their valid movements.
Note: Make sure to update self.beliefs.
For the tests in this question we will sometimes use a ghost with random movements and other times we will use the GoSouthGhost. This ghost tends to move south so over time, and without any observations, Pacman's belief distribution should begin to focus around the bottom of the board. To see which ghost is used for each test case you can look in the .test files.
To run the autograder for this question and visualize the output:
python3.6 autograder.py -q q3
If you want to run this test (or any of the other tests) without graphics you can add the following flag:
python3.6 autograder.py -q q3 --no-graphics
*IMPORTANT*: In general, it is possible sometimes for the autograder to time out if running the tests with graphics. To accurately determine whether or not your code is efficient enough, you should run the tests with the --no-graphics flag. If the autograder passes with this flag, then you will receive full points, even if the autograder times out with graphics.
As you watch the autograder output, remember that lighter squares indicate that pacman believes a ghost is more likely to occupy that location, and darker squares indicate a ghost is less likely to occupy that location. For which of the test cases do you notice differences emerging in the shading of the squares? Can you explain why some squares get lighter and some squares get darker?
Question 4 (2 points): Exact Inference Full Test
Now that Pacman knows how to use both his prior knowledge and his observations when figuring out where a ghost is, he is ready to hunt down ghosts on his own. This question will use your update and predict implementations together, along with a simple greedy hunting strategy which you will implement for this question. In the simple greedy strategy, Pacman assumes that each ghost is in its most likely position according to his beliefs, then moves toward the closest ghost. Up to this point, Pacman has moved by randomly selecting a valid action.
Implement the chooseAction method in GreedyBustersAgent in bustersAgents.py. Your agent should first find the most likely position of each remaining uncaptured ghost, then choose an action that minimizes the maze distance to the closest ghost.
To find the maze distance between any two positions pos1 and pos2, use self.distancer.getDistance(pos1, pos2). To find the successor position of a position after an action:
successorPosition = Actions.getSuccessor(position, action)
You are provided with livingGhostPositionDistributions, a list of DiscreteDistribution objects representing the position belief distributions for each of the ghosts that are still uncaptured.
You may break ties any way you like.
If correctly implemented, your agent should win the game in q3/3-gameScoreTest with a score greater than 700 at least 8 out of 10 times. Note: the autograder will also check the correctness of your inference directly, but the outcome of games is a reasonable sanity check.
To run the autograder for this question and visualize the output:
python3.6 autograder.py -q q4
If you want to run this test (or any of the other tests) without graphics you can add the following flag:
python3.6 autograder.py -q q4 --no-graphics
*IMPORTANT*: In general, it is possible sometimes for the autograder to time out if running the tests with graphics. To accurately determine whether or not your code is efficient enough, you should run the tests with the --no-graphics flag. If the autograder passes with this flag, then you will receive full points, even if the autograder times out with graphics.
Question 5 (2 points): Approximate Inference Initialization and Beliefs
Approximate inference is very trendy among ghost hunters this season. For the next few questions, you will implement a particle filtering algorithm for tracking a single ghost.
First, implement the functions initializeUniformly and getBeliefDistribution in the ParticleFilter class in inference.py. A particle (sample) is a ghost position in this inference problem. Note that, for initialization, particles should be evenly (not randomly) distributed across legal positions in order to ensure a uniform prior.
Note that the variable you store your particles in must be a list. A list is simply a collection of unweighted variables (positions in this case). Storing your particles as any other data type, such as a dictionary, is incorrect and will produce errors. The getBeliefDistribution method then takes the list of particles, converts it into a DiscreteDistribution object, and returns the normalized DiscreteDistribution object.
To test your code and run the autograder for this question:
python3.6 autograder.py -q q5
Question 6 (3 points): Approximate Inference Update
Next, we will implement the update method in the ParticleFilter class in inference.py. This method constructs a weight distribution over self.particles where the weight of a location is the probability of the observation given Pacman's position and the particles at that location. Then, we resample from this weighted distribution to construct our new list of particles.
You should again use the function self.getObservationProb to find the probability of an observation given Pacman's position, a potential ghost position, and the jail position. The sample method of the DiscreteDistribution class will also be useful. As a reminder, you can obtain Pacman's position using gameState.getPacmanPosition(), and the jail position using self.getJailPosition().
There is one special case that a correct implementation must handle. When all particles receive zero weight, the list of particles should be reinitialized by calling initializeUniformly. The total method of the DiscreteDistribution may be useful.
To run the autograder for this question and visualize the output:
python3.6 autograder.py -q q6
If you want to run this test (or any of the other tests) without graphics you can add the following flag:
python3.6 autograder.py -q q6 --no-graphics
*IMPORTANT*: In general, it is possible sometimes for the autograder to time out if running the tests with graphics. To accurately determine whether or not your code is efficient enough, you should run the tests with the --no-graphics flag. If the autograder passes with this flag, then you will receive full points, even if the autograder times out with graphics.
Question 7 (3 points): Approximate Inference Predict
Implement the predict function in the ParticleFilter class in inference.py. This function should construct a new list of particles that corresponds to each existing particle in self.particles advancing a time step, and then assign this new list back to self.particles. When complete, you should be able to track ghosts nearly as effectively as with exact inference.
Note that in this question, we will test both the predict function in isolation, as well as the full implementation of the particle filter combining predict and update.
As in the predict method of the ExactInference class, you should use:
newPosDist = self.getPositionDistribution(gameState, oldPos)
This line of code obtains the distribution over new positions for the ghost, given its previous position (oldPos). Recall that oldPos does not exist in the starter code and should be set by the student. The sample method of the DiscreteDistribution class will also be useful.
To run the autograder for this question and visualize the output:
python3.6 autograder.py -q q7
If you want to run this test (or any of the other tests) without graphics you can add the following flag:
python3.6 autograder.py -q q7 --no-graphics
*IMPORTANT*: In general, it is possible sometimes for the autograder to time out if running the tests with graphics. To accurately determine whether or not your code is efficient enough, you should run the tests with the --no-graphics flag. If the autograder passes with this flag, then you will receive full points, even if the autograder times out with graphics.
Question 8 (1 point): Joint Particle Filter Initialization
So far, we have tracked each ghost independently, which works fine for the default RandomGhost or more advanced DirectionalGhost. However, the prized DispersingGhost chooses actions that avoid other ghosts. Since the ghosts' transition models are no longer independent, all ghosts must be tracked jointly in a dynamic Bayes net!
The Bayes net has the following structure, where the hidden variables G represent ghost positions and the emission variables E are the noisy distances to each ghost. This structure can be extended to more ghosts, but only two (a and b) are shown below.

You will now implement a particle filter that tracks multiple ghosts simultaneously. Each particle will represent a tuple of ghost positions that is a sample of where all the ghosts are at the present time. The code is already set up to extract marginal distributions about each ghost from the joint inference algorithm you will create, so that belief clouds about individual ghosts can be displayed.
Complete the initializeUniformly method in JointParticleFilter in inference.py. Your initialization should be consistent with a uniform prior. You may find the Python itertools package helpful. Specifically, look at itertools.product to get an implementation of the Cartesian product. However, note that, if you use this, the permutations are not returned in a random order. Therefore, you must then shuffle the list of permutations in order to ensure even placement of particles across the board.
JointParticleFilter inherits your getBeliefDistribution implementation from Q5.
As before, use self.legalPositions to obtain a list of positions a ghost may occupy. Also as before, the variable you store your particles in must be a list.
To run the autograder for this question and visualize the output:
python3.6 autograder.py -q q8
If you want to run this test (or any of the other tests) without graphics you can add the following flag:
python3.6 autograder.py -q q8 --no-graphics
*IMPORTANT*: In general, it is possible sometimes for the autograder to time out if running the tests with graphics. To accurately determine whether or not your code is efficient enough, you should run the tests with the --no-graphics flag. If the autograder passes with this flag, then you will receive full points, even if the autograder times out with graphics.
Question 9 (3 points): Joint Particle Filter Update
In this question, you will complete the update method in the JointParticleFilter class of inference.py. A correct implementation will weight and resample the entire list of particles based on the observation of all ghost distances.
To loop over all the ghosts, use:
for i in range(self.numGhosts):
...
You can still obtain Pacman's position using gameState.getPacmanPosition(), but to get the jail position for a ghost, use self.getJailPosition(i), since now there are multiple ghosts each with their own jail positions.
Your implementation should also again handle the special case when all particles receive zero weight. In this case, self.particles should be recreated from the prior distribution by calling initializeUniformly.
As in the update method for the ParticleFilter class, you should again use the function self.getObservationProb to find the probability of an observation given Pacman's position, a potential ghost position, and the jail position. The sample method of the DiscreteDistribution class will also be useful.
To run the autograder for this question and visualize the output:
python3.6 autograder.py -q q9
If you want to run this test (or any of the other tests) without graphics you can add the following flag:
python3.6 autograder.py -q q9 --no-graphics
*IMPORTANT*: In general, it is possible sometimes for the autograder to time out if running the tests with graphics. To accurately determine whether or not your code is efficient enough, you should run the tests with the --no-graphics flag. If the autograder passes with this flag, then you will receive full points, even if the autograder times out with graphics.
Question 10 (3 points): Joint Particle Filter Predict and Full Test
Complete the predict method in JointParticleFilter in inference.py to resample each particle correctly for the Bayes net. In particular, each ghost should draw a new position conditioned on the positions of all the ghosts at the previous time step.
As in the last question, you can loop over the ghosts using:
for i in range(self.numGhosts):
...
Then, assuming that "i" refers to the index of the ghost, to obtain the distributions over new positions for that single ghost, given the list (prevGhostPositions) of previous positions of all of the ghosts, use:
newPosDist = self.getPositionDistribution(gameState, prevGhostPositions, i, self.ghostAgents[i])
Hint: Given a particle, replace that particle with a new one that contains a sample of each of the features of the old particle rather than using bruteforce to produce the belief over all possible locations. Think about why this works.
Note that completing this question involves grading both question 8 and question 9. Since these questions involve joint distributions, they require more computational power (and time) to grade, so please be patient!
As you run the autograder note that q10/1-JointParticlePredict and q10/2-JointParticlePredict test your predict implementations only, and q10/3-JointParticleFull tests both your predict and update implementations. Notice the difference between test 1 and test 3. In both tests, pacman knows that the ghosts will move to the sides of the gameboard. What is different between the tests, and why?
To run the autograder for this question and visualize the output:
python3.6 autograder.py -q q10
If you want to run this test (or any of the other tests) without graphics you can add the following flag:
python3.6 autograder.py -q q10 --no-graphics
*IMPORTANT*: In general, it is possible sometimes for the autograder to time out if running the tests with graphics. To accurately determine whether or not your code is efficient enough, you should run the tests with the --no-graphics flag. If the autograder passes with this flag, then you will receive full points, even if the autograder times out with graphics.
Submission
Complete Questions 0 through 10 as specified in the project instructions. Then upload bustersAgents.py and inference.py to Gradescope.
Prior to submitting, be sure you run the autograder on your own machine. Running the autograder locally will help you to debug and expediate your development process. The autograder can be invoked on your own machine using the command:
python3.6 autograder.py
To run the autograder on a single question, such as question 3, invoke it by
python3.6 autograder.py -q q3
Note that running the autograder locally will not register your grades with us. Remember to submit your code below when you want to register your grades for this assignment.
The autograder on Gradescope might take a while but don't worry: so long as you submit before the due date, it's not late.