15-494/694 Cognitive Robotics Lab 7:
OpenCV
I. Software Update and Initial Setup
- At the beginning of every lab you should update your copy of the
cozmo-tools package. Do this:
$ cd ~/cozmo-tools
$ git pull
- Note: new simple_cli commands "show pose" and "show landmarks".
- For this lab you will need a robot, a charger, some chips, and some paper.
- Log in to the workstation.
- Make a lab7 directory.
- Connect the Kindle to the robot and start simple_cli.
II. Chip Detection
- Download and run Chipper.fsm, which detects red chips.
- Read the code.
- The code converts the color image from RGB space to HSV (hue, saturation, and intensity) space.
Read this tutorial
to learn about color spaces and why HSV is useful.
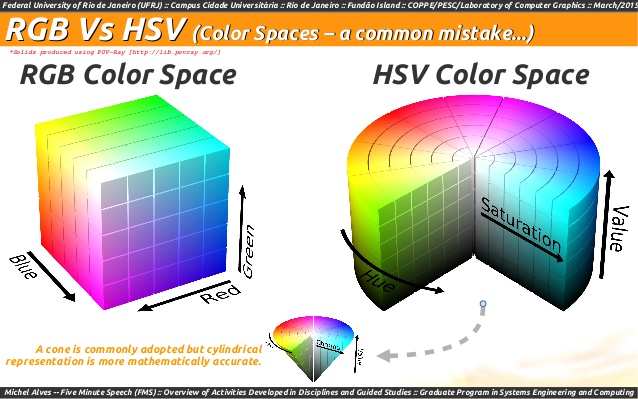
- Note that while most implementations of HSV use hue values from 0 to 360 degrees, in OpenCV
the range is 0 to 180 degrees. Red is at 0 degrees, so to get the full range of red values we
must check for two ranges: 0-10 degrees, and 170-180 degrees.

- Modify the Chipper program to display the image contours in a separate window. Look at the
CV_Contours demo in cozmo-tools/cozmo_fsm/examples to learn how to do this.
- Color image segmentation is sometimes unreliable because of
lighting variations. An alternative approach to chip detection is
to use a bullseye pattern and look for nested contours. Write a new demo
BullseyeChipper that does this.
III. Shape Matching
- Read the OpenCV tutorial
on shape matching.
- Run the match_shapes.py program, giving it the
files star-a.jpg, star-b.jpg,
and star-c.png.
- Review
the findContours
documentation.c
- Make up your own contour for a shape like the four-pointed star in the example.
- Use shape matching to have Cozmo detect your shape when it's
pasted to the wall. Create a display in OpenCV to show your results.
IV. Optical Flow
- Run the CV_OpticalFlow demo and move a textured object in front of the robot
to see how the system detects optical flow.
- Write your own program that uses optical flow to make Cozmo track a moving
object by turning towards it.
Hand In
Collect all your code and some relevant screenshots in a zip file.
Hand in your work through AutoLab by the date indicated in AutoLab.
|
{kind=link}
{kind=link}
{kind=link}