Research Projects in Omnidirectional Surveillance
Today, video surveillance and monitoring (VSAM) systems rely heavily
on conventional imaging systems as sources of visual information. A conventional imaging
system is severely limited in its field of view. It is only capable of acquiring visual
information through a relatively small solid angle subtended in front of the image
detector. To alleviate this problem, pan/tilt/zoom (PTZ) camera systems
are often employed. Though this enables a remote user to control the viewing direction of
the sensor, at any given instant, the field of view remains very limited. In short,
conventional VSAM systems have blind areas that are far larger that their visible areas.
Imagine that we had at our disposal an image sensor that could ``see'' in all
directions from its location (single viewpoint) in space, i.e. the entire ``sphere of
view''. We refer to such a sensor as being omnidirectional. It is easy to see that such a
device would have a profound impact on the nature of VSAM systems and their capabilities.
(a) An omnidirectional sensor would allow the VSAM system to be, at all times, aware of
its complete surrounding.
(b) Tracking a moving object would be feasible in software, without the need for any
moving parts (i.e. no panning, tilting, and rotating).
(c) Unlike physically tracking cameras, the omnidirectional sensor would have no
problem simultaneously detecting several objects (or intruders) in distinctly different
parts of its environment.
The goal of the omnidirectional VSAM research program at Columbia University
and Lehigh University is to create novel omnidirectional video sensors,
develop algorithms for omnidirectional visual processing, and use these sensors and
algorithms to build intelligent surveillance systems. Below, several research projects
within the omnidirectional VSAM program are briefly summarized. Most of these projected
are funded by DARPA's VSAM initiative. Some of the projects are funded in part by the
National Science
Foundation, the David and Lucile Packard Foundation, and an ONR MURI Grant.
Omnidirectional Video Cameras
There are several ways to enhance the field of view of an imaging system. Our approach
is to incorporate reflecting surfaces (mirrors) into conventional imaging systems that use
lenses. This is what we refer to as catadioptric imaging system. It is easy to see that
the field of view of a catadioptric system can be varied by changing the shape of the
mirror it uses. However, the entire imaging system must have a single effective viewpoint
to permit the generation of pure perspective images from a sensed image. At Columbia
University, a new camera with a hemispherical field of view has been developed. Two such
cameras can be placed back-to-back, without violating the single viewpoint constraint, to
arrive at a truly omnidirectional
sensor. Columbia's camera uses an optimized optical design that includes a parabolic
mirror and a telecentric lens. It turns out that, in order to achieve high optical
performance (resolution, for example), the mirror and the imaging lens system must be
matched and the device must be carefully implemented. Several early prototypes of
Columbia's omnidirectional camera are shown below. Further information related to
omnidirectional image sensing can be found here.



References:
"Omnidirectional Video Camera," Shree K. Nayar, Proc. of DARPA
Image Understanding Workshop, New Orleans, May 1997.
"Catadioptric Omnidirectional Camera," Shree K. Nayar, Proc. of
IEEE Conference on Computer Vision and Pattern Recognition,
Puerto Rico, June 1997.
A Complete Class of Catadioptric Cameras
As mentioned above, a catadioptric sensor uses a combination of lenses and mirrors
placed in a carefully arranged configuration to capture a much wider field of view while
maintaining a single fixed viewpoint. A single viewpoint is desirable because it permits
the generation of pure perspective images from the sensed image(s). The parabolic
catadioptric system described in the previous project is an example of such a single
viewpoint system. In more recent work, we derived the complete class of single-lens
single-mirror catadioptric sensors, which have single viewpoints. Some of the solutions
turn out to be degenerate with no practical value, while other solutions lead to
realizable sensors. We have also derived an expression for the spatial resolution of a
catadioptric sensor in terms of the resolution of the image detector used to construct it.
Finally, we have conducted a preliminary analysis of the defocus blur caused by the use of
a curved mirror. Our results provide insights into the merits and drawbacks of previously
proposed catadioptric cameras as well as draw our attention to some unexplored designs.
References:
"Catadioptric Image Formation," Shree K. Nayar and Simon Baker,
Proc. of DARPA Image Understanding Workshop, New Orleans, May 1997.
"A Theory of Catadioptric Image Formation,"
Simon Baker and Shree K. Nayar, Proc. of IEEE International
Conference on Computer Vision, Bombay, January 1998.
"A Theory of Catadioptric Image Formation,"
Simon Baker and Shree K. Nayar, Technical Report,
Department of Computer Science, Columbia University,
November 1997.
Software Generation of Perspective and Panoramic Video
Interactive visualization systems, such as Apple's QuickTime VR, allow a user to
navigate around a visual environment. This is done by simulating a virtual camera whose
parameters are controlled by the user. A limitation of existing systems is that they are
restricted to static environments, i.e. a single wide-angle image of a scene. The static
image is typically obtained by stitching together several images of a static scene taken
by rotating a camera about its center of projection. Alternatively, a wide-angle capture
device is used to acquire the image. Our video-rate omnidirectional camera makes it
possible to acquire wide-angle images at video rate. This has motivated us to develop a
software system that can create perspective and panoramic video streams from an
omnidirectional one. This capability adds a new dimension to the concept of remote visual
exploration. Our software system, called omnivideo, can generate (at 30 Hz) a large number
of perspective and panoramic video streams from a single omnidirectional video input,
using no more than a PC. A remote user can control the viewing parameters (viewing
direction, magnification, and size) of each perspective and panoramic stream using an
interactive device such as a mouse or a joystick. The output of the omnivideo system (as
seen on a PC screen) is shown below. Further details related to omnivideo can be found at here. Our current work is
geared towards the incorporation of a variety of image enhancement techniques into the
omnivideo system.

References:
"Generation of Perspective and Panoramic Video from Omnidirectional Video,"
Venkata N. Peri and Shree K. Nayar, Proc. of DARPA
Image Understanding Workshop, New Orleans, May 1997.
"Omnidirectional Video Processing,"
Venkata N. Peri and Shree K. Nayar,
Proc. of IROS U.S.-Japan Graduate Student Forum on Robotics, Osaka,
November 1996.
Remote Reality
The generation of a perspective view within a small window of a PC provides one type of
interface. Over the past six months we have made advances in both the speed with which one
can change the desired viewpoint and the speed of image generation. These advanced made it
practical for us to increase the field of view generated and allow us to integrate it with
a Head-Mounted-Display and head-tracker. The result is a system for visualization of
"live" action from a remote omnidirectional camera, i.e. a system for Remote
Reality.
This remote reality environment allows the user to naturally look around, within the
hemispherical field of view of the omnidirectional, and see objects/action at the remote
location.

If the omnidirectional video is recorded, say using a standard camcorder, the
visualization can be remote in both space and time. Current the system provides 320x240
resolution color images of 30frame-per-second (fps) video with position updates from the
head-tracker at between 15 and 30 fps. While the resolution is limited compared to today's
high end graphics simulators, we believe this has much to offer for training and very
significant advantages for very-short turn around "VR model acquisition" for
in situ training and mission rehearsal. The system is quite inexpensive. The
HMD/display system costs under $3000 for us to build from Common-Off-The-Shelf (COTS)
components, with omnidirectional recording system costing about the same. The image insert
shows the HMD component of system and an Omnidirectional camera on a vehicle mounting
bracket.
For the general training the system has the advantage of having very realistic, albeit
lower resolution, motion/action while not limiting the users viewing direction. The
omnidirectional camera can be mounted on a vehicle or carried in a field-back to allow
remote users to better experience the field conditions. Further its low cost combined with
the ease with which one can easy acquire a new training "environment" would mean
that it could be used at local facilities and maintained/customized with very little
training. It can also be used for recording/review of training exercises.
For the pre-mission rehearsal, the system provides a very unique capability. If a
omnivideo were acquired either by a vehicle drive through an area of interest and/or by a
very-low altitude UAV fly-through, then an in-field remote-reality system could provide in
situ rehearsal where users could review the site, in any direction. As the system could
either use live video transmissions from the remote camera, or if more practical, a
recorded tape, the "turn-around time" from acquiring the data to mission
rehearsal would minimal. With a monocular display the system and the next generation of
wearable computers, the system could be extended to allow a group of mobile agent to
independently view remote sites, e.g. with a robotic vehicle carrying the camera into
forward locations.
The evaluation of this work has two components. The first evaluation is to insure the
design constraints, 30fps video and 15fps head tracking are met. The second evaluation is
tied to image quality which will be evaluated other aspects of this project. Over the next
few months we will continue to enhance the software, to port it to Windows-NT (its
currently Linux based), and increase the types of HMD and head-trackers that are
supported. We are also investigating, at a lower priority, auditory processing and
software to aid in development in better/easier augmentation of the remote environments
with information such as textual labels or active icons.
Omnidirectional Monitoring Over the Internet
The Internet can serve as a powerful platform for video monitoring. When the scenes of
interest are truly remote, it is hard to access the outputs of the cameras located in the
scene. In such cases, a client-server architecture that facilitates interactive video is
attractive. Today, there are quite a few video cameras that are hooked up to the internet.
Images produced by such a camera can be accessed by a remote user with the push of a
button. In some cases, the orientation of the camera can also be controlled remotely.
Unfortunately, clients must be scheduled (say, on a first-come-first-serve basis); if two
users wish to interact with the camera at the same time, one must be served first while
the other waits. This greatly limits the extent of interaction possible. Our
omnidirectional cameras and the accompanying software provide a powerful means for remote
visual monitoring. Since the camera captures an omnidirectional field of view, each remote
viewer can request his/her own view, which is efficiently computed from the same
omnidirectional image. Scores of users can therefore be serviced simultaneously, without
any conflicts. In addition, we have used
state-of-the-art video compression and transmission techniques to ensure that users can
view and manipulate their video streams close to real-time (a good link provides about 5
frames a second). A live demonstration of the first omnidirectional web-camera can be seen
here.
Catadioptric Stereo
Catadioptric stereo, as the name suggests, uses mirrors to capture multiple views of a
scene, simultaneously. Based on our results on catadioptric image formation, we have
studied a class of stereo systems that use multiple mirrors, a single lens, and a single
camera. When compared to conventional stereo systems that use two cameras, this approach
has a number of significant advantages such as wide field of view, identical camera
parameters and ease of calibration. While a variety of mirror shapes can be used to obtain
the multiple stereo views, it is convenient from a computational perspective to ensure
that each view is captured from a single viewpoint. We have analyzed four such stereo
systems. They use a single camera pointed towards planar, ellipsoidal, hyperboloidal, and
paraboloidal mirrors, respectively. In each case, we have derived epipolar constraints. In
addition, we have studied exactly what can be seen by each system and formalized the
notion of field of view. In particular, we have implemented two catadioptric stereo
systems and conducted experiments to obtain 3-D structure. Below you see sketches of the
four different catadioptric stereo systems. Also shown is an image captured by a parabolic
stereo system and a depth map computed from it.
References:
"Sphereo: Recovering Depth Using a Single Camera and Two Specular Spheres,"
Shree K. Nayar, Proc. of SPIE: Optics, Illumination, and Image Sensing
for Machine Vision II, Cambridge, November 1988.
"Stereo Using Mirrors," Sameer Nene and Shree K. Nayar,
Proc. of IEEE International Conference on Computer Vision,
Bombay, January 1998.
"Stereo Using Mirrors," Sameer Nene and Shree K. Nayar,
Technical Report,
Department of Computer Science, Columbia University,
November 1997.
A Handy Stereo Camera
We have implemented a compact portable version of our catadioptric stereo design that
uses planar mirrors. The complete stereo system is shown below. It uses two planar mirrors
that are hinged together. The angles of the two mirrors can be adjusted independently to
vary the field of view of the stereo system.
A single Hi-8 video camera records reflections from the two planar mirrors. The camera
has a built in zoom lens that permits further control of the stereo field of view. The
baseline of the stereo system is determined by the angles of the with respect to the
optical axis of the camera and the distance of the camera from the mirrors.

An image of an object produced by the stereo system is shown below. Since both views of
the scene are captured using the same camera, the image centers, the focal lengths, aspect
ratios, and gamma functions
for both views are identical. This makes stereo calibration much simpler than in a
two-camera stereo system, even when the positions and orientations of the mirrors are
unknown. Furthermore, both views
are captures at the same instance and hence there are no synchronization issues to be
dealt with. The calibration simply involves computing the rotation and translation between
the two virtual camera coordinate
frames corresponding to the two mirrors. These unknowns are easily computed by using
selected a small number of corresponding pairs in the two views and then computing the
fundamental matrix. Below the result of such a calibration are shown. The computed
fundamental matrix is used to plot epipolar lines in the right view for the marked points
in the left view. Also shown are the computed depth map, textured mapped and a novel view
of the depth map.
Combined Omnidirectional and Pan/Tilt/Zoom System
This project is geared towards the use of an omnidirectional imaging system to guide
(or control) one or more conventional pan/tilt/zoom (PTZ) imaging systems. Such a combined
system has several advantages. While the omnidirectional camera provides relatively
low-resolution images compared to narrow field-of-view camera, it is able to provide a
complete view of activities in an area. The omnidirectional video can therefore be used to
drive conventional PTZ systems (popularly known as "domes" in the security
industry). The control can either be manual or automatic. In the manual mode, interesting
regions of activity are selected by clicking on the omnidirectional video display. A
pre-computed map that relates coordinates in
the omnidirectional and PTZ systems is used to orient the PTZ system to provide a
high-quality video stream of the region of interest. In the automatic mode, a motion
detection algorithm is used to detect moving objects
in the omnidirectional video. Since there can be several moving objects, a scheduling
algorithm is used to determine the sequence in which the PTZ system watches the moving
objects as well as determine the time it devotes to each object. Below, the combined
omnidirectional and PTZ system is shown. The omnidirectional camera hangs beneath the PTZ
system. Our current work is geared towards developing sophisticated control laws for the
trajectories of the PTZ system, the use of approximate site models to determine the
mapping between the omnidirectional and PTZ system, the design of novel scheduling
algorithms that would emulate different surveillance behaviors and the scaling of the
current system to one that includes multiple omnidrectional and PTZ systems.

Omnidirectional Egomotion Analysis
An application that clearly benefits from a wide field of view is the computation of
ego-motion. Traditional cameras suffer from the problem that the direction of translation
may lie outside of the field of view of the
camera, making the computation of camera motion sensitive to noise. We have developed a
method for the recovery of ego-motion using omnidirectional cameras. Noting the
relationship between spherical projection and wide-angle imaging devices, we propose
mapping the local image velocity vectors to a sphere, using the Jacobian of the
transformation between the projection model of the camera and spherical projection. Once
the velocity vectors are mapped to a sphere, we have shown how existing ego-motion
algorithms can be applied to recover the motion parameters (rotation and translation). We
are currently exploring real-time variants of our optical flow and egomotion algorithms.
These algorithms would have direct applications such as: navigation , dead-reckoning,
stabilization, time to collision estimation, obstacle avoidance, and 3D structure
estimation.
References:
"Egomotion and Omnidirectional Sensors,"
Joshua Gluckman and Shree K. Nayar,
Proc. of IEEE International Conference on Computer Vision,
Bombay, January 1998.
Smooth Object Tracking without Moving Parts
This project is geared towards developing algorithms for smooth tracking of individual
objects moving within the omnidirectional field of view. The key idea is to use our
omnivideo software system to create a perspective video stream that is focused on a moving
object; i.e. the viewing direction and magnification are updated so as to keep the tracked
object in the center of the computed perspective stream. This algorithm uses a combination
of differencing and background subtraction, followed by sequential labeling, to find large
moving regions. Simple temporal analysis is done to keep the labels of moving objects
consistent over frames. A Kalman filter is then employed to generate smooth trajectories
for the viewing parameters. These parameters are used in real-time to update the
perspective video stream. The system therefore behaves very much like a pan/tilt/zoom
system but without any moving parts. Below, a perspective video stream is shown that is
focused on a fast moving object. We are currently exploring ways to use our computed
trajectories to smoothly control a pan/tilt/zoom system.

Frame-Rate Multi-Body OmniDirectional Tracking
Fast tracking is an important component of automated video surveillance systems. The
non-traditional geometry of the omnidirection sensor means that many existing tracking
algorithms, which presume motion is well approximated by translation in the image, cannot
be used. Thus a significant component of the first 6 months of our project has been the
design and implementation of a low lever tracking system for omnidirectional images.
The omnidirectional tracker is designed to handle multiple independent moving bodies
undergoing non-ridged motion. The algorithm is based on background subtraction followed by
connected component labeling, with subtle differences from previous work to better handle
the variations of outdoor scenes, tracking very small objects and fast moving objects. The
tracker can localize moving objects in the omnidirectional image and generate perspective
views centered on each object. The system runs at 30fps on a Pentium II class processor
when tracking and generating a few perspective images.
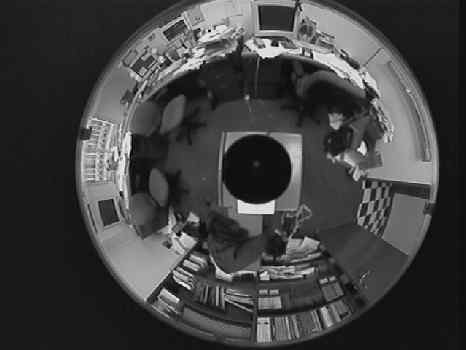
The example here shows an omnidirectional image on Lehigh's campus with
"boxes" superimposed on all the tracked regions. The four windows at the bottom
show the four most significant targets. The targets are (left to right): a car and three
different people walking. Rounded boxes and arrows were added to highlight the
relationships. (Note: web-encoding reduces image quality :-) Image showing omnidirectional
tracker and generated views. 
The current software will provide a base for the more significant research issues we
will address over the next few months. The ongoing research includes:
- how to better adapt to changing outdoor conditions and how to evaluate such algorithms
- How to selectively ignore "unimportant" motions such as swaying trees.
- increasing the length of time where an objects identity is maintained, especially when
it is first "seen"
- How to provide an aid in focus of attention among a large number of moving targets
including how to smoothly control the virtual "camera view" and when to switch
views between targets.
OmniMovie Compression
An Omni-Directional image sequence provides some unique advantages and also unique
challenges for compression. For surveillance applications, the omnidirectional nature
removes the need for a continuously panning/tilting camera. Thus the omnidirectional image
stream provides wide-field coverage while maintaining a mostly static image sequence. For
the quasi-static regions traditional MPEG compression of the difference from the reference
image works reasonably well. However when there is motion, either of objects

or of the camera, MPEG compression starts to break down. The fundamental problem is
that MPEG is strongly biased toward motions that are well approximated as pure
translational motion within the image. Unfortunately, object/camera translations in the
world are not well approximate by translations in the Omni-directional image, thereby
limiting the image quality and compression rate of MPEG compressed omnidirectional scenes,
especially for a moving omnicamera.
We are currently exploring different schemes to provide lower-bandwidth and higher
quality compression. The approach currently under investigation is a generalization of
MPEG to allow different spatial "biases". Rather than considering a 3x3 regular
grid of potential "motions", we consider 9 more generally specified regions to
which an block could move --- in an omnidirectional image sequence these regions include a
significant rotation component. The basic compression algorithm is then very MPEG like:
For each 8x8 block, compute the difference between that block and each of the 9
"predicted locations" from the previous frame and then encode the
"direction" of motion and DCT compress the difference image. The predicted
locations are spatially varying but temporally constant making them easy to encode. Since
for the surveillance applications we will already be doing object tracking, and probably
transmitting some representation of object motion, we will be exploring using this
tracking data to further bias the "motion". The quality and performance of this
algorithm is currently being evaluated and is expected to be finished in the next few
months.
SuperResolution OmniImages
With a 360 degree by 180 degree field of view, all packed within a standard video
image, resolution is often an issue. To help mitigate this, we are developing algorithms
that combine tracking, high quality image warping and robust estimation to fuse produce
" super-resolution" images. We have already demonstrated our techniques for more
traditional sensors, see our DARPA Image
Understanding Workshop paper for a summary of our two different approaches as well as
our detailed web docs/papers.
- Ming-Chao Chiang and
Terrance E. Boult, "Local Blur Estimation and
Super-Resolution, CVPR '97. or download the PostScript Version
- Ming-Chao Chiang and
Terrance E. Boult, Efficient Image Warping and Super-Resolution,
Proceedings of the Third IEEE Workshop on Applications of Computer Vision, pages
56-61, Dec 1996. or download the PostScript Version
- Ming-Chao Chiang and
Terrance E. Boult, The Integrating Resampler and Efficient Image
Warping, Proceedings of the ARPA Image Understanding Workshop, pages
843-849, Feb 1996.
We are currently concluding a quantitative evaluation of the image-based technique
using recognition rates as the primary metric. Over the next six months we will be
adapting the technique to the omnidirectional sensor, where the warping and blurring
models need to be more complex. Outdoor lighting issues should be addressed with our
edge-based technique, though it will be limited by the quality of matching with varying
shadows and non-ridge objects.
Live Images in the IUE and Distributed IUE
Over the past few months we have been working on extending the IUE to better support
VSAM applications. As VSAM applications tend to be near real time, we needed to provide a
means of interaction with a smaller/fast subset of the IUE. We have prototyped, a new set
of classes for image filtering which will make it possible to develop standalone image
processing oriented programs with no IUE linkage but which can be recompiled/linked to
allow full IUE interactions. These classes are highly templated, including the input and
output image types, and they allow "non-IUE" image representations to be used.
This should allow more rapid integration of this IUE subset into existing systems, with
the benefit that the resulting classes will then be usable within the IUE. Over the next
few months we will extend our prototype to include a frame grabber interface with
processing via IUE "callbacks", and then extend the image classes to provide for
bounded ring buffer type storage. We will also be porting our tracking code to the IUE to
ensure the extensions will provide support
A second aspect of our IUE related work has been addressing distributed communication
and processing using the IUE. We have built upon MPI MPI,
a low-level message passing interface, to allow communication of IUE objects between a
collection of processes, with the IUE Data Exchange providing for serialization, see .
Over the six months we will be developing a "string-oriented" remote access
mechanism that will permit remote function execution, and over the next year will
explore/development of a CORBA wrapper for the IUE.