It is important for autonomous systems to be cognizant of their own capabilities and limitations. The goal of this project is to develop techniques and metrics that enable robots to assess their own proficiency to achieve tasks in a variety of situations. At CMU, we are investigating the use of simulation techniques to learn how to robustly achieve tasks in a variety of environments and the use of active learning to make learning from human demonstration more efficient. The scenarios being investigated are all manipulation tasks using the Baxter robot, including playing rothe game of Jenga.
This work, which is joint with Henny Admoni and Aaron Steinfeld at CMU, along with researchers at U Mass Lowell, Tufts, and BYU, is supported by the Office of Naval Research.
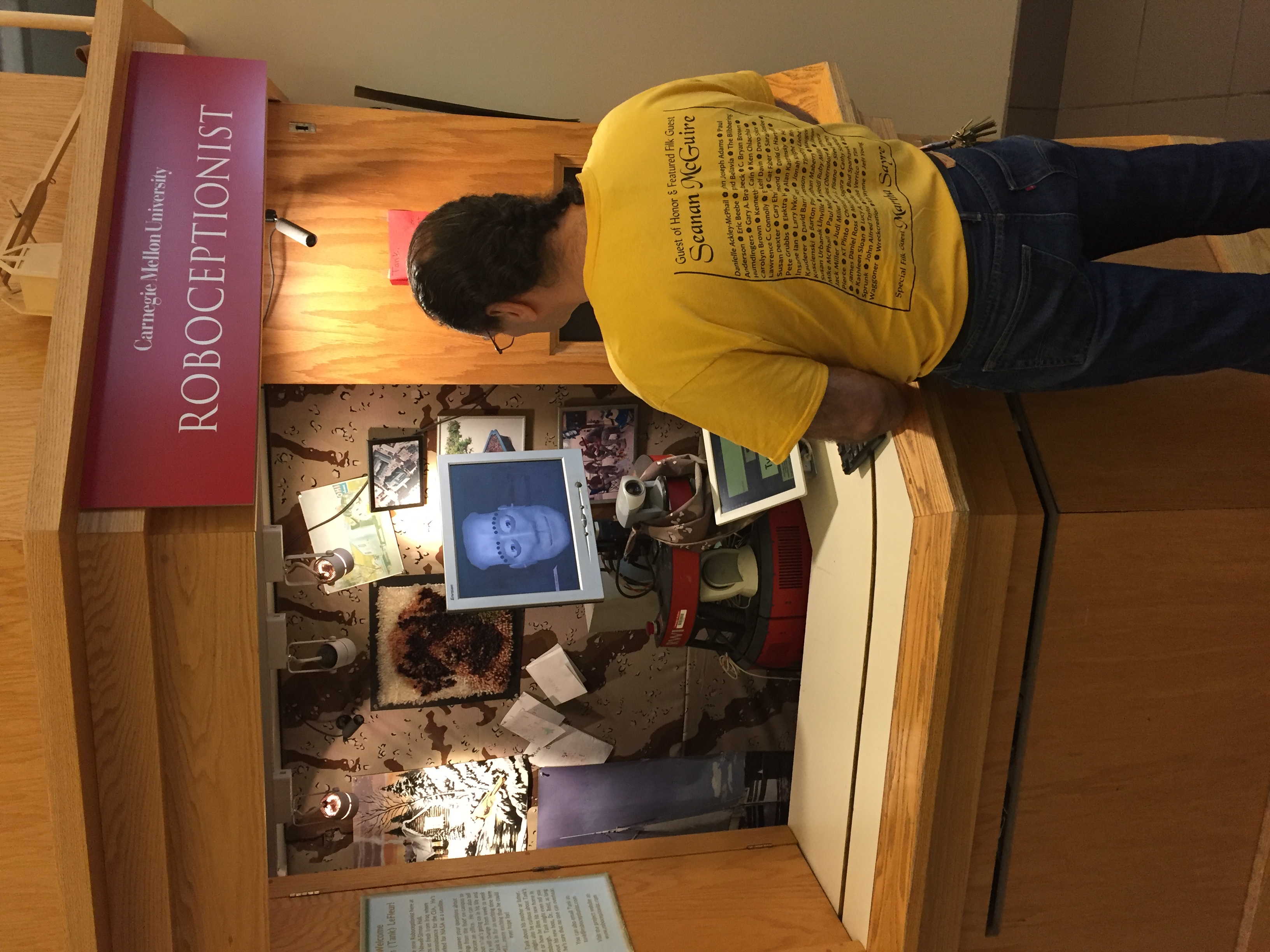
The goal here is to make robots more useful and acceptable by enabling them to interact with humans using social rules and conventions. This includes navigating amongst people in a socially acceptable manner, using non-verbal communication to signal robot emotion and attitude, and conversational interaction. In particular, in conjunction with members of the School of Drama, we have developed and deployed a two robots that have character and personality: Tank, the Roboceptionist, is deployed near the entrance to Newell-Simon Hall and provides useful information; Victor, the Gamebot, is deployed in an atrium in Gates-Hillman Center and interacts with people while playing Scrabble.
This work is currently supported internally by the Robotics Institute.
Data science, which consists of building models and extracting knowledge from large volumes of data, is currently more of an art than a science. Expert data scientists approach the task quite differently from novices, making them more efficient and effective in finding meaningful patterns in the data. This project aims to use machine learning techiques to characterize the differences in expert and novice data scientists and explain the differences in ways that help novices do analysis more effectively and efficiently.
This work, which is joint with Stephanie Rosenthal, is supported by JP Morgan.
{kind=link}
{kind=link}