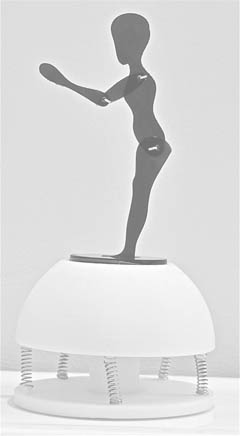
The CAD Model of the diver body was created in a unique way. Because the diver is a free-hand drawing that cannot be broken down into simple shapes, an image of the diver was uploaded onto SolidWorks (the program used to model this toy). Then, using the spline tool and trying to follow the image methodically, the diver was drawn and then extruded
.