Holonomic Motion Control
The
Palm Pilot Robot can move holonomically across flat surfaces, which in
this case means it may move in any direction while simultaneously controlling
rotational speed. This is true because the omni-wheels have rollers that allow
them to freely roll sideways but control the motion in the direction the wheel
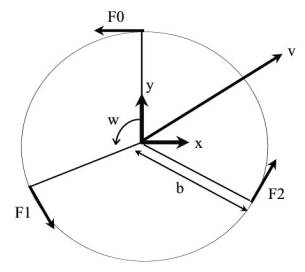
is pointing. The following diagram and analysis illustrates how a desired motion
vector and rotational velocity can be resolved into the wheel velocities that
will create the desired motion.
In
the control program, this analysis is incorporated into a function Vector_Drive(V, w) which drives the robot in a direction specified by a given vector V, while
rotating the robot at an angular speed w.
 r
-wheel radius
r
-wheel radius
F0, F1, F2 -unit direction vectors
v - desired body velocity expressed in body coordinate frame
w
- angular velocity
b - wheel baseline
v0, v1, v2 - wheel linear velocities
w0,
w1,
w2
- wheel angular velocities
n - wheel number
pn - velocity of the body at a given wheel n
F0 = [-1, 0]
F1 = [1/2, -sqrt(3)/2]
F2 = [1/2, sqrt(3)/2]
Finding
body velocity from wheel velocity:
Each wheel constrains the velocity in
a particular direction at the specified point. At each wheel, the velocity
depends on v and w,
and is the sum of the velocity due to rotation (expressed in the body frame) and
the motion of the body frame in the world:
pn = v + (b•w)*Fn
pn•Fn = wheel velocity, therefore
wheel velocity = v•Fn + b*w
and r*wn
= v•Fn + b*w.
Thus:
w0
= (v•F0 + b*w) / r
w1
= (v•F1 + b*w) / r
w2
= (v•F2 + b*w) / r
Last updated: October 06,
2000 22:25