 Problem Statement
Problem Statement | Design |
Evaluation |
Solution |
Quibbler
|
Competitive Analysis 01
|
Robo Hacking 05 |
References 06 |
Evaluation |
01 Competitive Analysis |
We acquired various toys that our user population plays with in order to get a sense of what current interactions entailed. The main toy that was most similar was the Robosapien. We also acquired less electronically augmented toys such as Transformer and Gundam action figures to get a sense of the style of similar toys.
Robosapien
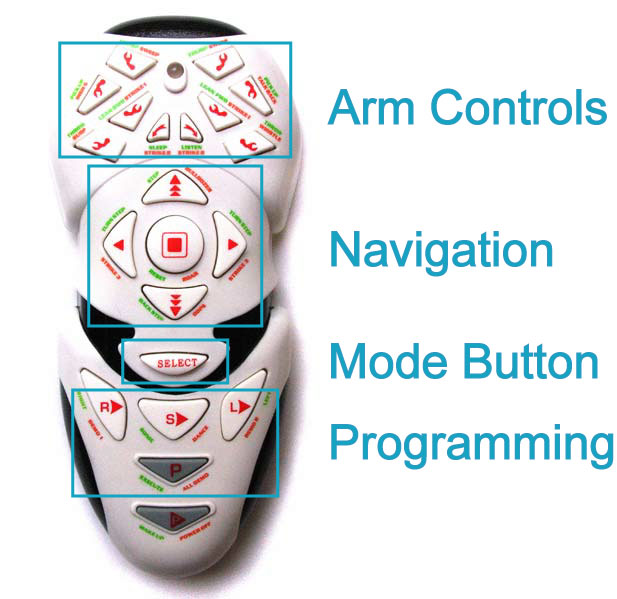
The Robosapien was the closest toy for comparison, since its user group is the target of our customers. The Robosapien is a remote-controlled humanoid robot that can walk around, grasp objects with its hands, and has a variety of pre-programmed sounds and movements (such as dancing). There are three basic modes of controls which a single button toggles in between: regular, green, and orange. Regular commands are often simpler quick movements, green is more complex actions such as picking things up and orange movements are self-proclaimed *attitude* actions such as talking back and dancing.

Transformers
TRANSFORMERS-mechanical vehicle <--> humanoid action figure
Dirt Boss-size small, complexity small
small monster truck <--> humanoid
insert key to unsnap wheels to lower car down
had to follow instructions to transform to humanoid, going back relatively simple
nicer than Energon in that you can't tell what the associated vehicle is when it's a humanoid (Energon has plunks)
!wheels don't all spin great on ground
Energon-size small, complexity medium
cool in instructions: "Notes: Some parts are made to detach if excessive force is applied and are designed to be reattached if seapartion occurs. Adult supervision may be necessary for younger hcildren"
wheels are better in that all four will spin on ground
-firing mechanism not obvious; also, sound plays when you insert, not when you fire
-wheels don't like to stay in car mode
-front parts of the van doors were breaking off as instructions said
  |
  |
  |