

For this assignment, we used a Minolta Vivid 700 scanner to get a texture and depth range to work with. Starting with Prof. Heckbert's Inventor format converter code and Prof Seitz's fltk windowing code, I created a program that can read in a Inventor file and display it on the screen.
Here are the images of the object I scanned, a monkey with a banana:
| Scene Scanned | Depth information retrieved from Monkey (w/ Texture) |
|
|
From then, I started working on the algorithm from the McMillan Paper. It was relatively easy to understand and code. The one problem that I did have was in interpreting the delta values (that they are actually 1/z, not z itself). This caused a major problem with my interface for a long time - when you rotated the object, it would just fly off the screen!
Here is a picture of the interface I was using:
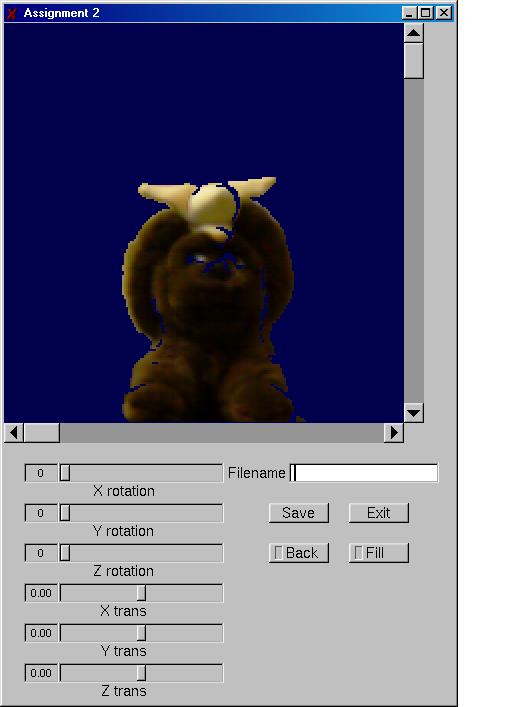
I had sliders for the rotation and translation. I had thought of doing a virtual trackball type thing and doing incremental changes to u, v, o and c and saving them, but it did not seem necessary. I also have a button for adding in the Z unknown pixels back in, but for the most part it didn't look as good to me. Also, you can turn hole filling on an off as a speed up.
The way I did the program is with just using OpenGL's raster commands. I had no real interest in creating a polygon scan converter, and we couldn't use OpenGL. I used the Grid Data structure from the ivgrid.c file, modified the grid.h to carry the extra data I needed to allow my program to read in Inventor files without outside help. From there I did a little modification of the mosaic starter code to create my interface, and added a file to do the parts of McMillan's algorithm such as computing the warp as well as the new point of view and visibility determination.
Here is a picture from before visibility determination and hole filling, but you can clearly see the 3d nature of the point cloud, as well as see some of the missing data::

Finished Product: Here are some images from the 9 different camera projection positions, as described in the paper.
 |
 |
 |
 |
 |
 |
 |
 |
 |
Here is a 90 image that looks pretty good, but definitely has some issues with hole filling colors, as you can see to the right of his arm where it is a bit lighter color with dark speckles.

My implementation seems to work for the most part, but there are some definite problems.
 you can see
the cracks in the background picture. I assume that my hole filling is
skipping over this because it works at a 200x200 resolution, and OpenGL is
displaying at a 400x400 resolution.
you can see
the cracks in the background picture. I assume that my hole filling is
skipping over this because it works at a 200x200 resolution, and OpenGL is
displaying at a 400x400 resolution. Example of bad span
Example of bad span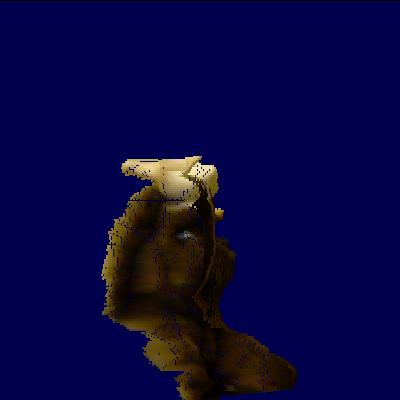 you can clearly see
the monkey's left arm through his head. When I turn the hole filling off,
you can see through the monkey's face and I believe that's what causes it.
you can clearly see
the monkey's left arm through his head. When I turn the hole filling off,
you can see through the monkey's face and I believe that's what causes it.
Aside from a few small dumb mistakes, my biggest problem had to be the fact that I was misinterpreting the delta values as Z instead of 1/z which was not allowing me to test the code because I could not rotate. Once I figured that small fact out, the rest of the project was pretty smooth