Vehicle Model Identification
My first project as a Ph.D. student was on vehicle model identification, and I continue to research this topic as part of my thesis.
Wheeled mobile robots (WMRs) require accurate motion models for position estimation and model predictive control and planning. Most fielded WMRs use basic kinematic motion models, but we made enhancements to account for wheel slip, powertrain transients, and stochasticity (to quantify uncertainty).
Calibrating these models manually can be laborious and inaccurate. We developed an automated calibration method based on Integrated Prediction Error Minimization (IPEM). Motion models are commonly expressed as differential equations - instead of calibrating to the DE directly, we calibrate to its integral over an extended interval. Our method has several advantages: it can handle temporally and spatially sparse ground truth, it improves observability, and it optimizes predictive accuracy over a chosen horizon. The trade-off is complexity and computational cost, which we address through linearization. Unlike some alternatives, our IPEM calibration method does not require the execution of special trajectories, and can run online to adapt to changing conditions. Both the systematic and stochastic models can be calibrated simultaneously.

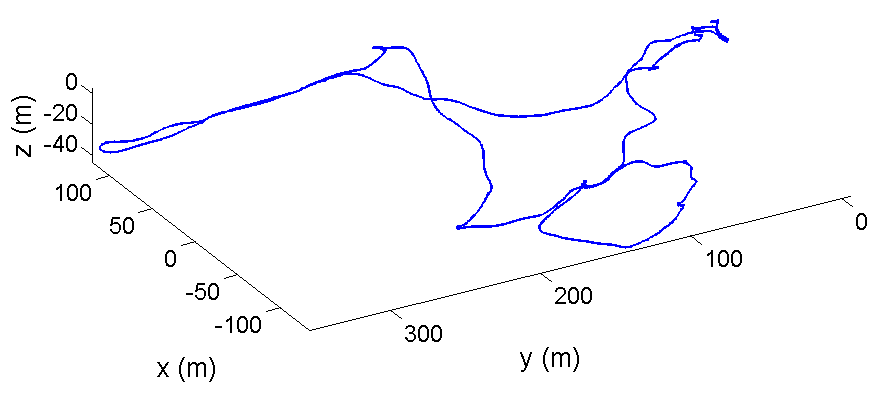
We validated our method on numerous vehicles and terrain types. In all tests we greatly reduced systematic pose prediction error and accurately characterized the remaining random error. Here I summarize results on the Crusher platform at Camp Roberts CA, but more extensive results are provided in our publications. Crusher is a six-wheeled skid-steer platform with active suspension, developed at NREC with DARPA funding.


Relevant Publications
Neal Seegmiller, Forrest Rogers-Marcovitz, Gregory A. Miller, and Alonzo Kelly, A Unified Perturbative Dynamics Approach to Online Vehicle Model Identification, Proc. International Symposium on Robotics Research, August, 2011. |pdf|
Neal Seegmiller, Forrest Rogers-Marcovitz, and Alonzo Kelly, Online Calibration of Vehicle Powertrain and Pose Estimation Parameters using Integrated Dynamics, Proc. IEEE International Conference on Robotics and Automation, May, 2012. |pub|pdf|
Neal Seegmiller, Forrest Rogers-Marcovitz, Gregory A. Miller, and Alonzo Kelly, Vehicle Model Identification by Integrated Prediction Error Minimization, International Journal of Robotics Research, Vol. 32, No. 8, July, 2013, pp. 912-931. |pub|pdf|
Acknowledgements
This research was made with U.S. Government support under and awarded by the Army Research Office (W911NF-09-1-0557), the Army Research Laboratory (W911NF-10-2-0016), and by the DoD, Air Force Office of Scientific Research, National Defense Science and Engineering Graduate (NDSEG) Fellowship, 32 CFR 168a.
Copyright © 2024 Neal Seegmiller