Interactive Segmentation Tool-Box
An implementation of ‘Lazy Snapping’ and ‘GrabCut’:
Based on Interactive Graph Cuts
Lazy Snapping [2] and
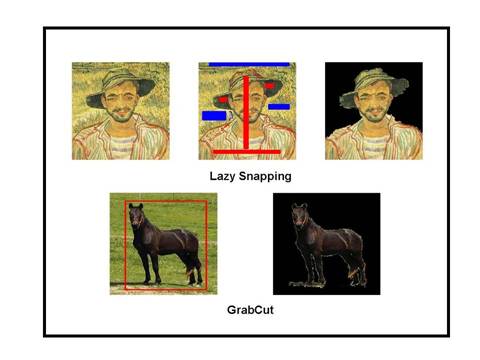
GrabCut [3] are 2D image segmentation tools based on the interactive graph-cuts
technique proposed by Boykov and Jolly [1]. Lazy Snapping requires the user to
specify foreground and background seeds, and performs 2D segmentation with the
seeds as hard constraints. GrabCut makes the process more automatic by using
iterated graph cuts – the only user interaction required is a bounding box of
the foreground object.
We provide an implementation of both these tools, along with a third tool which combines both these methods. Our code uses the maxflow code [4] by Vladimimr Kolmogorov.


![]()
Source Code
Requires MATLAB and mex (C++) compiler. You will need kmeans on MATLAB to run the code. Refer the README file for compilation instructions.
![]()
PASCAL Data-Set

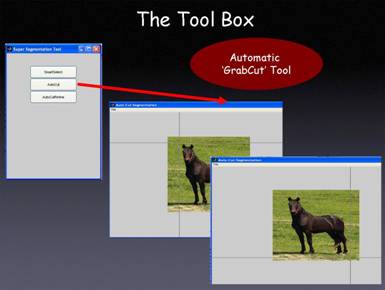
Our Segmentation Tool
can be used to perform segmentation on huge image databases. As an example, we
provide results of using the
Grab Cut Tool on a subset of the PASCAL data set [5] (a few different Object
Classes). We use the Bounding Boxes available along with this set to seed our
iterative graph cuts algorithm. The parameters given in the parameter file can
be fine-tuned to achieve desirable segmentations.
Note:
The coarseness around the boundary of the segmented results is due to the fact
that the code runs segmentation on water-shed super-pixels instead of pixels, for efficiency purposes. Using
super-pixels, we achieve a significant speed-up at the cost of slight loss of
accuracy.
![]()
References
[1] Interactive Graph Cuts for Optimal Boundary & Region Segmentation of Objects in N-D Images. Boykov & Jolly, ICCV 2001 [PDF]
[2] Lazy Snapping. Yin Li, Jian Sun, Chi-Keung Tang, Heung-Yeung Shum, SIGGRAPH 2004 [PDF]
[3] GrabCut — Interactive Foreground Extraction using Iterated Graph
Cuts. Rother, Kolmogorov & Blake, SIGGRAPH 2004 [PDF]
[4] http://www.adastral.ucl.ac.uk/~vladkolm/software.html
[5] http://www.pascal-network.org/challenges/VOC/voc2005/index.html
![]()
![]()
Contacts
For questions/comments about the code, please contact:
Mohit Gupta – mohitg@cs.cmu.edu
Krishnan Ramnath
– kramnath@andrew.cmu.edu
OR
You can post your
comments/questions here
This project was done as part of the Advanced perception class
at the Robotics Institute, CMU. Class
Instructor: Alexei Efros
![]()