|
|
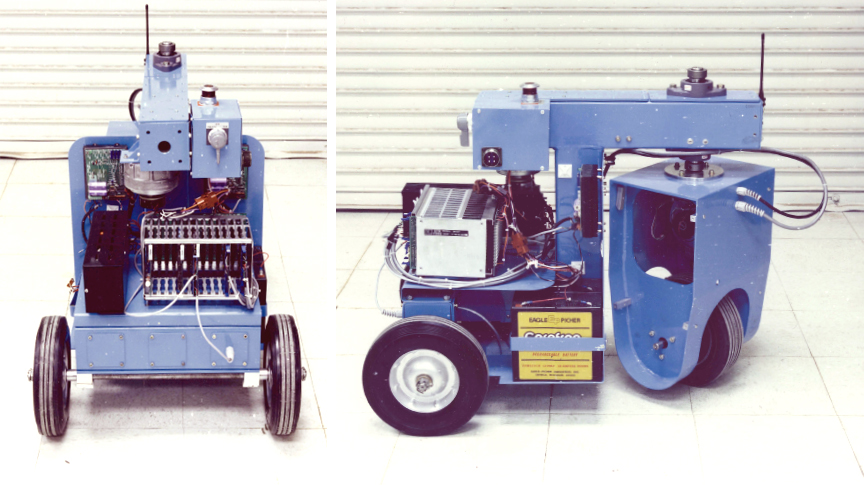
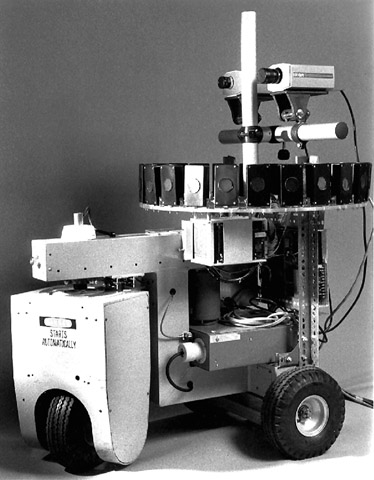
"Neptune"
1984A functional mobile robot.
|
Utilitarian minimalism.
The front wheel is driven and steered by syncronous motors running on 120VAC 60Hz. Copied by other research organizations. |
Conceptual Design: Gregg Podnar Mechanical Design: Gregg Podnar Electrical Design: Mike Blackwell Sensors: Kevin Dowling |